Icy moons around Jupiter and Saturn offer exciting venues for possible life elsewhere in our Solar System. But how do we penetrate surface ice to reach the oceans below? In today’s post, Kostas Konstantinidis surveys the field of in-situ operations on places like Enceladus and Europa. Enceladus will be a tricky place to land thanks to rough topography and polar lighting conditions. Europa poses its own challenges; once we’re down, how do we power up the technologies to get below the ice? Kostas developed a mission concept for DLR, the German space agency, to sample subsurface plume sources on Enceladus as part of the Enceladus Explorer (EnEx) project. He is currently working on a PhD thesis at Bundeswehr University (Munich) simulating a safe landing on that world, and tells me he hopes that by the end of his academic career, he will have ‘a nice mugshot of an alien microbe swimming around in its natural environment to show for it.’ How to get that mugshot is a fascinating issue, as he explains below.
by Kostas Konstantinidis
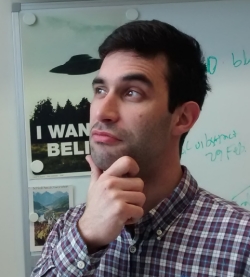
The search for life in the solar system has been one of the guiding goals of space exploration since its conception. The recent discoveries that the icy moons of the giant planets in our solar system contain vast oceans, has made them prime targets for that search. In particular, Jupiter’s moon Europa and Saturn’s moon Enceladus (Figure 1) are currently the most promising candidates among the icy moons, as they appear to fulfill the basic requirements for them to host life: the heat that is generated by the tidal pull of the parent planet maintains a subglacial ocean in the liquid state and in direct contact with the rocky core of the moon, through which reactions critical for the creation of the building blocks of basic life as we understand it can occur. Exchange processes through the thick ice shells covering those moons, much like in the polar regions of Earth, mean that further chemicals needed for life are transported from the surface where they have been delivered by e.g. micrometeoroids, all the way down to the ocean. The chemical makeup of plume jets found to emanate from the south pole of Enceladus by the recently decommissioned Cassini spacecraft further point to a chemically rich ocean hospitable to microbial life.
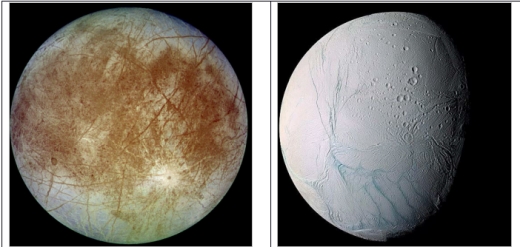
Figure 1: Jupiter’s moon Europa (left) and Saturn’s moon Enceladus (right), currently the most promising targets for the search of life in the solar system. Credit: Wikimedia
As evidence on the habitability of Europa and Enceladus is mounting, the question arises of where on these moons could possible microbial ecosystems exist, and how we could investigate them.
Signs of life and potential ecosystems on Europa and Enceladus
The currently most plausible hypothesis about where life might emerge and flourish in the oceans of the icy moons, is near possible hydrothermal vents on the ocean bottom. Around the hydrothermal vents an exotic energy generating process occurs: carbon dioxide, dissolved in ocean water, reacts to form organic matter. However, instead of sunlight as the energy source as is the case for our more familiar photosynthesis, microorganisms use the vent fluids’ chemical energy. This process is called chemosynthesis. Ecosystems of such chemotrophic microbes can thus flourish around these vents. After the discovery of such a hydrothermal vent in the bottom of the Earth’s ocean in 1977, it has been proposed that even life on Earth could have originated from such a location.

Figure 2: A hydrothermal vent in the bottom of the Earth’s ocean. Credit: Smithsonian Magazine
Once life is created near the vents, it can then migrate and populate other hospitable niches in the ocean of an icy moon (Figure 3). A first niche where microbes could survive is the interface between the ice shell and the ocean. Exchange processes transferring chemicals from the surface means that a concentration of chemicals and nutrients could be present on the bottom of the ice shell, from which microbial life could be sustained.
There are various transport methods through which any microbial life could be carried closer to the surface. The most direct is through channels that directly connect to the plumes on the surface. Such plumes have been observed on Enceladus, and there are strong indications that they exist on Europa [3]. Microbes from the ocean could be carried along with the ocean water, and then ejected to space via the plumes. The microbes would remain in their original state up to a certain depth under the plumes and could even form small microbial communities in pockets of liquid water close to the plume channel. Any potential life forms will be heavily altered by exposure to vacuum after they are ejected by the plumes, but signatures of life might be detectable in the plume material, and in the deposits of plume material on the surface of the icy moon.
There are also less dramatic ways for life and its signs to be transferred from the ocean, closer to the surface. Glaciological processes in the ice shell slowly transfer ocean material upwards. Geological characteristics on the surface point to the existence of subglacial lakes and liquid water pockets that might or might not be hosts to ecosystems of microbes originating from the ocean. Material from the ocean can eventually reach the surface, in particular in areas that offer evidence of intense glaciological processes like breaks on the ice shell and overturned ice blocks. Once on the surface, ocean material and any signs of possible life contained in it, are degraded by the strong radiation surrounding the giant planets.
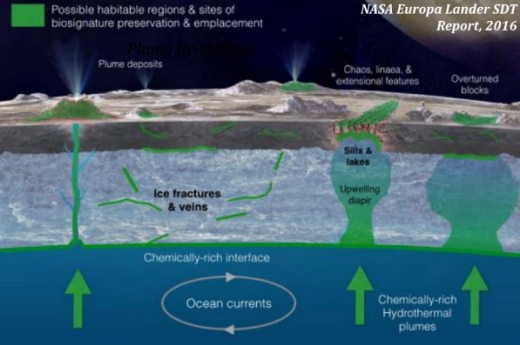
Figure 3: Potential habitable regions on an icy moon, and transport mechanisms of ocean material to the surface [1]
The development of instruments to detect the signs of life, as well as study any existing life, is a fascinating field in its own accord. Here I will not discuss those instruments; I will describe instead mission concepts and some of the necessary technologies to deliver such instruments on their target environments on Europa and Enceladus.
Plume fly-through
A first mission concept would aim to take advantage of the “free samples” of fresh ocean material we are kindly offered from the plumes (Figure 4). In this concept, a spacecraft either flies through the plumes, analyzes the captured sample on the spot, and transmits the resulting data back to Earth, or it returns a captured sample to Earth where it is analyzed in dedicated laboratories.
The Cassini spacecraft until recently in orbit around Saturn flew through the plumes several times but was not equipped to perform the sophisticated measurements necessary for definitive life detection. A mission concept combining on-the-spot sampling and sample return to Earth is the LIFE (Life Investigation For Enceladus) mission, originally proposed in 2009 [1].
The main technological challenge is instrumentation to capture the sample at the high relative velocities involved, without evaporating it. This is done by using aerogel, a material similar to ballistic gel. If returning the sample for analysis to Earth, then very strict planetary protection rules mean that the risk of exposing the sample to the Earth environment must be minimal. This means that atmospheric reentry of the sample carrying vehicle must be very reliable, and that expensive installations and labs must be built to handle the sample in a safe way. A similar mission with sample return from the tail of a comet was the Stardust mission [5], that successfully returned a sample to Earth in 2006.
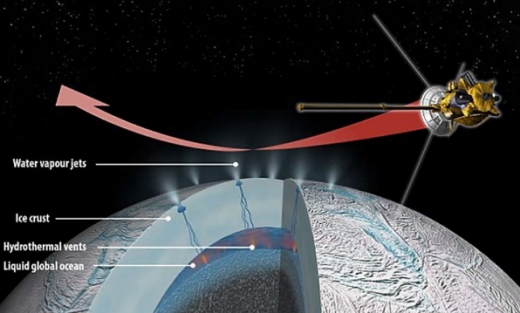
Figure 4: Cassini flying though the plumes of Enceladus. A plume flythrough mission would have the same concept. Credit: MailOnline
Surface and near sub-surface
As we saw above, thanks to glaciological processes material from the ocean can be transported all the way to the surface over thousands of years. Material on the surface and up to a meter close to it will be degraded by the intense radiation around the parent planet of the icy moon (especially for Europa’s parent planet, Jupiter). Therefore, sampling the surface, and especially the near subsurface, can allow the detection of certain signs of microbial life. We can gain access to the surface to perform these measurements using planetary landers. NASA are currently planning such a lander mission to Europa (Figure 6) [2].
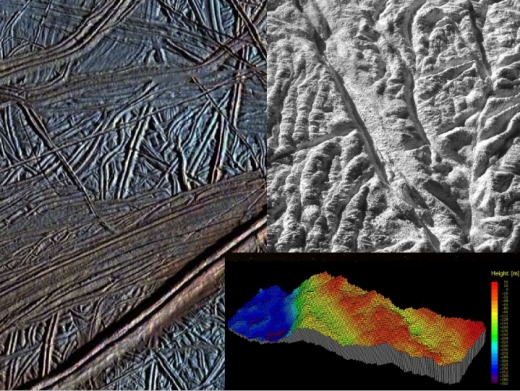
Figure 5: Typical terrains of the icy moons. Left: a chaos terrain on Europa. Right: canyon terrain on Enceladus. Inset: A digital elevation model of a Europa terrain. Credit: NASA

Figure 6: Illustration of the NASA Europa Lander on the surface on Europa. Credit: NASA
Due to the various glaciological processes on Europa and Enceladus, the terrain tends to be very rough on these moons (Figure 5). This high terrain roughness significantly affects the design of the landing system. To land safely, the lander will have to sense the terrain and be able to autonomously decide on a new landing spot if the original one is found to be too risky. Hazard detection is performed by utilizing sensors like cameras and laser scanning lidar to identify hazards. On-board software then decides on the optimal landing area. The lander must also be able to know its own position with enough accuracy so that it can land accurately on a safe spot. Using input from the same sensors used for hazard detection, software is used to detect particular features, and then track them through time in order to be able to infer the landers position relative to them. On-board guidance software is used in case a landing trajectory must be calculated to a new safer landing spot. The lander thrusters are then commanded to follow this new trajectory (Figure 7).
Such a landing scenario is significantly more challenging than those of past Moon and Mars lander missions, where landing areas were less hazardous, and less landing accuracy was required, as a rover could typically be deployed after landing and drive for up several kilometers to interesting targets on the surface.
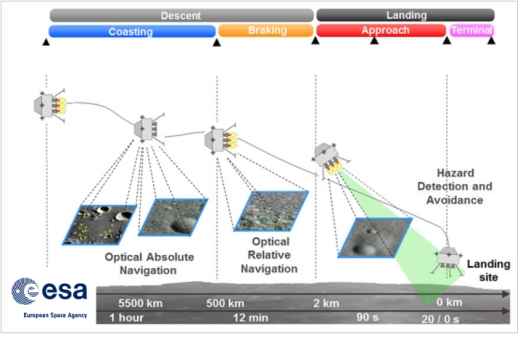
Figure 7: The landing sequence of the ESA Lunar Lander mission concept. A landing on the icy moons will follow a similar scenario [Credit: ESA Lunar Lander)
Another concept to sample the near subsurface are the so-called planetary penetrators. They are bullet shaped vehicles that are deployed from orbit and impact the planetary surface with a velocity of close to 300 m/s (1000 km/h). Thanks to the high impact velocity the penetrator is emplaced to a depth of a few meters under the ice. Once there it can deploy its instruments and sample the surrounding ice, which has been unaffected by the radiation on the surface (Figure 8).
A few penetrators have been sent to Mars and the Moon as secondary payloads, unfortunately with no success. A penetrator concept for the icy moons (Europa) is CLEP (Clipper Europa Penetrator) that was considered as a secondary payload for the future NASA Europa Clipper mission [6].
Penetrators can be a relatively inexpensive way to sample the surfaces of the icy moons but are risky, as their track record demonstrates. The main technological challenge for penetrators, is to develop a meaningful set of miniaturized instruments that can also withstand the high impact shock, as well as other resilient systems, like the communications subsystem to relay data from the measurements. A simpler version of the landing system described above could help with targeting a penetrator more accurately to safer areas.
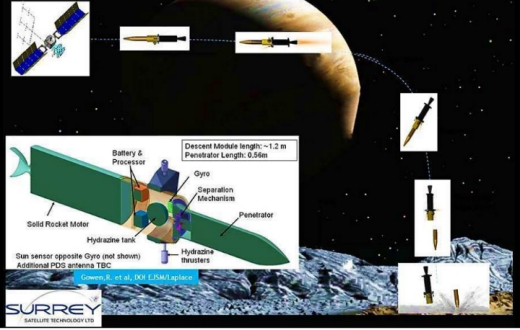
Figure 8: The concept of operations of a penetrator for Europa. Inset: Illustration of a penetrator and its delivery vehicle. Credit: University of Surrey
Subsurface liquid water pockets
Water pockets in the ice shell of Enceladus or Europa are interesting targets for exploration for possible signs of life. Arguably the most promising spot for accessing near subsurface liquid water pockets is right under the plume sources on Enceladus (and possibly also on Europa). The combination of the relative ease of access to these water pockets and the freshness of the material contained in them makes them a very desirable target.
To access these subglacial areas, a probe must melt through up to a few hundreds of meters of ice to sample the potential liquid water pocket habitat. The melting probe is deployed to start melting by a lander. A mission concept to sample subglacial water pockets under the plume sources on Enceladus was developed (by the author) as part of the Enceladus Explorer (EnEx) project funded by the German space agency DLR [7][8].
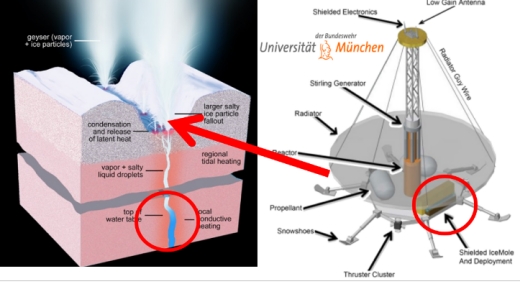
Figure 9: Illustration of the Enceladus Lander concept [7]: A lander touches down inside the plume source canyon and deploys the IceMole melting probe (red circle on the left). A cut-out of a plume source canyon on Enceladus. Adapted from [9]
To melt through the few hundreds of meters of ice, a so called shallow melting probe is needed. Electrical power produced on the lander is transferred through a cable and powers electrical melting heads on the melting probe. By heating the melting heads on different sides of the probe the probe is maneuverable and can avoid obstacles under the ice such as meteorites, cracks, etc. The design of an appropriate cable is also a challenging proposition. It must be lightweight, though strong enough to withstand the tuck and pull from the surrounding ice. It must be able to be unrolled without getting stuck or causing other issues and must carry high power loads with minimal loss. To properly take advantage of the maneuverability, the probe must have an accurate knowledge of its position using on-board navigation sensors and be capable to autonomously make decisions to avoid subglacial obstacles. An important issue with such melting probes is the large amount of power needed to power them. Since a lot of power is lost during the transformation from electrical power to thermal on the melting heads, such a melting probe would have large power needs. Currently those power needs can be met only by small nuclear reactors on board the lander or at least with high capacity fuel cells (essentially a very high capacity battery). Both solutions face limitations, including mainly the large mass of reactors and the issues accompanying the use of nuclear material near a potential extraterrestrial habitat. However, the relative advantage remains, that the reactor stays in the surface and does not go under the ice where the potential habitat is.
An example melting maneuverable melting probe is the IceMole developed by FH Aachen in Germany. The probe uses combined screwing and melting for increased maneuverability. The IceMole was tested near Blood Falls in Antarctica in 2015 in an analogue scenario to melting the ices of Enceladus [10].
Subglacial water pockets tend to be in geologically rough areas. The plume source terrain on Enceladus is a good example of this. They are situated along the bottoms of canyons in the south pole of Enceladus, dubbed the Tiger Stripes (Figure 5). The rough canyon topography, along with the terrain texture resulting from the plume fallout that covers the canyon terrains with superfine snow, and in addition the polar lighting conditions, make a landing near the plumes very difficult, with accuracy and landing safety requirements much more demanding that any past automated planetary landing that we have attempted or are currently planning. An even more sophisticated version of the landing system discussed above will be needed for such a landing.
One of the most challenging problems of astrobiological planetary exploration that we have not yet discussed is planetary protection, i.e. the need to not contaminate any possible habitable niches in the target environments with microbial life from Earth. There are microbes that can withstand the radiation and vacuum of space for years tucked away in parts of a spacecraft. A lot of work goes on for sensitive missions to identify and limit the bioload that remains on a spacecraft or lander that is to be sent to a sensitive area. Such microbes can be very persistent and reducing microbial loads to within acceptable levels can be a daunting task. With the lander aiming to land right next to an opening that very likely leads directly to the ocean of an icy moon, reducing the risk of inadvertently introducing Earth microbes and other potentially damaging materials brought from Earth becomes a driving design requirement. Considering the risky nature and statistics of past planetary landings this will be a difficult thing to ensure. The melting probe that will directly access the potential habitat must be sterilized in levels that have been so far unprecedented in planetary protection.
Accessing the ocean
The subglacial ocean is the main source of interest in the icy moons, as it is the most likely source and host of currently existing microbial life on the icy moons. To gain access to the ocean itself, a mission would have to melt through the entire ice shell for at least a few kilometers. A probe could study the ice-ocean interface or simply float in the ocean while sampling it. If it were to sample a hydrothermal vent on the ocean bottom, a submersible would have to navigate several kilometers to the bottom and locate a vent there. It would then be able to study the potential source of life on the icy moons and arguably the single most promising location in the solar system for the existence of life.
Figure 10 illustrates a mission concept to deploy a submersible in the ocean of an icy moon. As the bulk of the science of such a mission is to be performed by the submersible, it must be ensured that it reaches the ocean with a high likelihood. This means that for the mission to be viable, the landing must be safe and reliable, and significantly more so than past planetary lander missions have been.
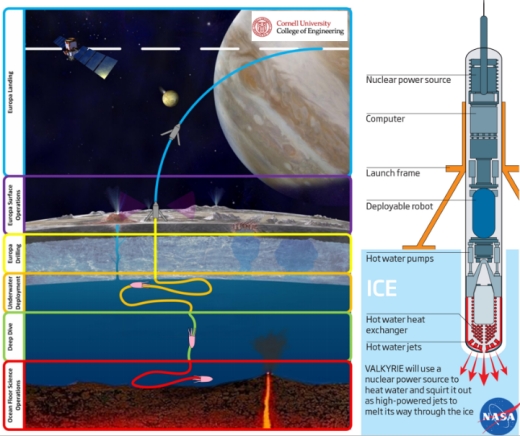
Figure 10: Left: Concept for the deployment of a submersible to explore the ocean floor of Europa. Credit: Cornell University. Right: Nuclear heater melting probe concept. Credit: NASA
Melting through several kilometers of ice will be quite a challenge for a mission to access the ocean of an icy moon, and potent melting methods will be necessary. Of course, the shallow melting probe described above could be adapted for deep melting, but the length of the cable needed could prove problematic. A similar method for melting through large amounts of ice is by using high energy laser beams powered by a high-performance energy source on the lander, through a fiber optic cable. The main advantage here is that power losses associated with an electrical cable and melting head are eliminated, thus making melting more efficient. This would require however even larger amounts of power generated at the surface by the lander, which in turn would mean even heavier power sources. Such a melting probe is being developed by Stone Aerospace [11].
A method of melting through the ice that completely circumvents cables, is using thermal power directly provided on-board the melting probe, by nuclear heat sources. Such heat sources have been used in space exploration since the 1970s and are non-fissile isotopes of plutonium or other radioactive material, that thanks to active nuclear reactions produce large amounts of heat (Figure 11). Bricks of such materials are enclosed in vessels that are highly resistant to impact and explosion and are used to either heat the surrounding ice to produce hot water jets (Figure 10), or to melt the ice via direct contact. Hot water jets can be used to melt with some degree of maneuverability. Such power sources however face possible issues with transporting nuclear material to a potential extraterrestrial habitat. These concerns are somewhat alleviated by enclosing the radioactive material in their containment vessels. The heat generated by these nuclear sources cannot be “turned-off” and it could act as a heat source for Earth microbes that hitched a ride on the melting probe to potentially survive and contaminate the ocean. Still such power sources offer a relatively lightweight and efficient way of melting through the ice. Communication back to the lander is done by dropping behind radio or acoustic relay stations in the ice.
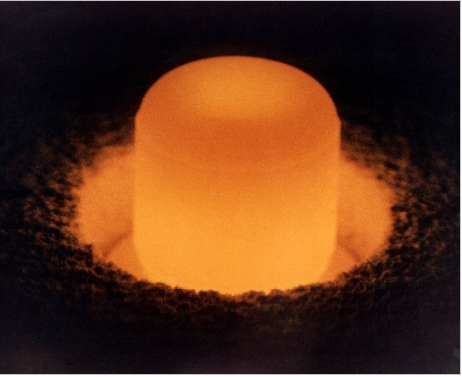
Figure 11: A pellet of plutonium-238, used for radioisotope thermoelectric generators. The pellet can be seen glowing from its own heat. Credit: Wikimedia
Once in the ocean, a submersible is deployed, and it must navigate towards a plume source. This must be done for a depth of tens of km, despite the ocean currents, the lack of reference points in the environment that would help in localizing the submersible, and the lack of contact to the operators on Earth. The submersible must then communicate the collected data to a relay station that remains on the ice-ocean interface, that will then forward the data back to the lander.
This requires impressive capabilities of autonomously localizing itself in the ocean and, to large extent, autonomous operations. The DLR funded Europa Explorer (EurEx) project has been developing navigation and autonomy methods for such an exploration scenario [12] (Figure 12). The ARTEMIS submersible being developed by Stone Aerospace is also another example of technology development necessary for the exploration of the oceans of the icy moons [13]. A recent study by Cornell university investigated alternative mobility in the oceans of the icy moons by using (appropriately squid-like) biomimetic soft robots, and novel power harvesting methods via electromagnetic tethers deployed in the ocean [14]. Such alternative approaches hold promise for new and unexpected ways to explore the icy moons.
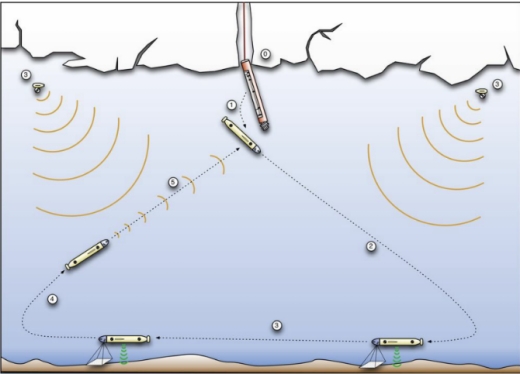
Figure 12: Schematic overview of a possible mission scenario for the EurEx submersible. The submersible is deployed at the ice-ocean interface, navigates to the ocean bottom for scientific measurements, and returns to the deployment point for data transfer and battery recharging [12]
Conclusion
The search for extant or extinct life in the solar system has been one of the driving motivations behind space exploration. Up to now several missions have explored Mars and have identified it as a very promising place where microbial life could have once existed. The next step for the search for life in the solar system is then to turn to the places in the solar system most likely to currently host life, the icy moons. A programmatic shift in priorities towards the search for life might be in the works in the agencies as seen by the establishment of an Ocean Worlds program by NASA [15]. An ambitious stepwise exploration program in the coming decades, comprised of the mission concepts described above, will be one of the most challenging undertakings in the history of space exploration. It will however help answer some of the most fundamental questions of mankind about the origin and provenance of life in the universe.
References
[1] Europa Lander SDT Report & Mission Concept, presentation to OPAG in Atlanta, GA, Kevin Hand et al., 2017
[2] Europa Lander Study 2016 Report, Europa Lander Mission Concept Team, 2016, https://solarsystem.nasa.gov/docs/Europa_Lander_SDT_Report_2016.pdf
[3] https://www.space.com/36464-jupiter-moon-europa-water-plume-hubble.html
[4] LIFE – Enceladus Plume Sample Return via Discovery, Peter Tsou et al., 45th Lunar and Planetary Science Conference, 2014
[5] https://stardust.jpl.nasa.gov/home/index.html
[6] CDF study report CLEO/P, Assessment of a Europa Penetrator Mission as part of NASA Clipper Mission, 2015,
http://sci.esa.int/future-missions-department/56440-assessment-of-a-europa-penetrator-mission-clep-cdf-study/#
[7] A lander mission to probe subglacial water on Saturn?s moon Enceladus for life, Acta Astronautica, v. 106, p. 63-89, 2015, https://www.sciencedirect.com/science/article/pii/S0094576514003610
[8] http://www.dlr.de/rd/en/desktopdefault.aspx/tabid-10572/18379_read-42824/
[9] The possible origin and persistence of life on Enceladus and detection of biomarkers in the plume., C.P. McKay et al., Astrobiology. 8 (2008) 909–19. doi:10.1089/ast.2008.0265.
[10] Blood Falls – EnEx probe collects first ‘clean’ water samples, DLR press release, 2015, http://www.dlr.de/dlr/presse/en/desktopdefault.aspx/tabid-10172/213_read-12733/#/gallery/18529
[11] VALKYRIE, A prototype cryobot for clean subglacial access and sampling, http://stoneaerospace.com/valkyrie/
[12] Design of an Autonomous Under-Ice Exploration System, Mark Hildebrandt et al., 2013, http://ieeexplore.ieee.org/document/6741164/
[13] ARTEMIS, The Robotic Search for Life on Icy Worlds Begins in the Analog Environment Beneath the McMurdo Ice Shelf, http://stoneaerospace.com/artemis/
[14] Soft-Robotic Rover with Electrodynamic Power Scavenging, NIAC Phase 1 report, Cornell University, https://www.nasa.gov/sites/default/files/atoms/files/11-2015_phase_i_mason_peck_soft_robotic_rover_electrodynamic_power_scavenging.pdf
[15] https://www.nasa.gov/specials/ocean-worlds/
[16] The European Lunar Lander: Robotics Operations in a Harsh Environment, Presentation, Fisackerly, R.,
http://robotics.estec.esa.int/ASTRA/Astra2011/Presentations/Session%203A/01_fisackerly.pdf


They are designing this robot submarine for exploring Titan, but I do not see why it cannot also be sent to Europa and Enceladus:
https://news.wsu.edu/2018/02/07/wsu-builds-nasa-alien-ocean/
It’s a lot easier to get to Titan’s seas, given that they’re sitting on the surface and not buried beneath kilometres of ice. The pressures the submarine would have to withstand are orders of magnitude less severe than a hypothetical Europa or Enceladus submarine. Plus you’ve got an atmosphere so you can use parachutes for the landing, and the radiation environment on the surface is going to be less severe.
Getting to the deep water/ammonia ocean in Titan’s interior would be much more difficult, but that’s not what’s being discussed there. The environments are totally different, the engineering requirements are too.
Yes but keep one valuable point in mind: Europa is 400 million miles closer to Earth than the Saturn system.
I know we could explore all these worlds and more if we chose to, but if we have to start picking and choosing, let us go with the closer one first.
If distance is the overriding concern, why even go to Europa when Mars, Venus and the Moon are all closer?
Because the chances are better and easier for finding life on Europa than any of the other worlds you mention. Yes, even Mars.
There are lots of unexplored habitats on Earth where the chances of finding life are far greater than on Europa. Given that the ocean floor is closer and there is a better chance of finding life, why bother with all this space stuff anyway?
I don’t really have to answer that, do I?
Excellent article.
The instrumentation needs to be carefully selected too, especially for “search for life” missions. If Europan/Enceladan life is in any way like that on Earth, we can expect isotopic ratio changes between natural elements and those involved with life. So a mass spec needs to be included to analyze plume and water samples. If life is chemosynthetic, then we might expect excess methane in the samples, especially if they have high concentrations of CO2 and the core is not outgassing methane. Again a mass spec would work here.
As we have found microbes on the outside of the ISS, it is just possible that any microbes might survive intact in the plumes. This suggests that if they have DNA, it might be possible to extract and sequence samples. The recent successes of the Mini-Ion sequencer that is tiny suggests a development path to include such a device on a space probe for such missions, at least on a followup mission if life looks like it has been found.
A Europa/Io sample return mission was discussed on Centauri Dreams here:
https://centauri-dreams.org/2014/05/28/proposed-europaio-sample-return-mission/
A sample return mission would get around the instrumentation problem; back on Earth, the samples could be subjected to every analysis scientists could think of. It would also avoid the difficulties of landing and the biological contamination issues, and presumably be relatively inexpensive. This would seem like the best approach for at least early missions.
A sample return mission would be wonderful, but at this point limited to the plumes. A vehicle that could return with a sample obtained from a lander/submarine would be much more expensive and very much larger than one that could use gravity assists to take plume samples and then return home. The chance of sample loss is also a risk.
We haven’t had a sample return mission to the Moon in decades, and none from Mars. A robotic, sample return mission to a gas giant moon seems ambitious at this point.
I would prefer missions that are inexpensive, can do some good science, hopefully, provide evidence for or against life in the easiest way possible before engaging in much more expensive missions with misdirected goals. If the plumes are sterile with no evidence of life, is there much point in designing life searching missions on the surface or in the oceans? Better to design those missions for other goals.
Life on Mars is most likely subsurface if it exists. The best way to determine that is to sample the aquifer leaks on the sides of craters. No deep drilling required. If there is life in the icy moons’ oceans, then there should be some evidence of it in the plumes. What we need is to bring along instruments that can best deliver on the answer, rather than just offer hints that can be interpreted in a number of ways. For example, suppose we bring along a DNA sequencer to test the water from a plume. It might find nothing, or it might just find sequences. If so, that would be pretty definitive. Detecting chirality in organic [protein] material might be another test. Bring along an imager that can act as a microscope and look for cells in the plume sample. Isolate any promising objects and subject them to tests, even stains and observe them again. Not easy to be sure, but we don’t have to think of these tests as a scientist at a bench with a bulky optical microscope and dropper bottles of stains on a shelf. This can be automated with fluidics, and digital/optical microscopes of van Leeuwenhoek level capability. With some good design, I am guessing that a battery of test devices could be packed into a shoebox-sized device with a mass of a few kg at most. The MiniIon DNA sequencer masses just 100g.
Yes, I was thinking of (and should have said) a plume sample return mission. No landing etc required!
There is a lot elegance to these proposals, but they seem costly and complex to deploy (just what kind of terrain will they be able to handle)
Are we holding back from using a more brute force approach because it might harm “organisms” there. I am in particular referring to Europa.
Could we send a 500 kg, slug (of water ice if you dont want to contaminate the surface) It could be positioned to take advantage of Jupiters gravity to give it high kinetic energy on impact. and have your lander close by to take advantage of the liquid pool it would create. how long would it remain liquid. (I guess a score of hours) . Agree that it will steralize the immediate impact zone. but did we really expect life in the solid Ice? This would be to access the supposedly more liquid layers underneath the surface.
Rob your idea could be combined with plume fly-throughs and give much more bang for the buck. The success of Deep-Impact using 300 kg of copper to ablate comet material set a good precedent. Low hanging fruit first right?
First class article Kostas! Many thanks
Kostas, thanks for this great article, whose wealth of detail allows us to dream about the possibilities future missions might find in these distant icy moons. This is a silly question really, but I am curious: having spent years of your life thinking about it, can you now estimate your own credence in the existence of life, at least microbial, on any of those worlds? I realise your belief has nothing to do with the facts on the ground, and while you would certainly *hope* to find life in a mission, a good scientist would be careful not to mistake his or her own hopes for probabilities–and would also be cautious about proclaiming what the odds are that life is there without any kind of evidence either way. Maybe you can’t even tell, through introspection, what you subconsciously actually believe the chances are that life is there, because it’s all so bound up in your hopes for the mission. But to the extent that you’re able to judge what you feel is likely, deep down, as influenced by everything you picked up in your studies of those worlds, could you share your impression of that estimate here?
Thank you for your kind words Jon! Although not an astrobiologist myself (I’m a space systems engineer), what I gather from discussions with several of them is that there is a great unknown in the root of the question of how and where life could originate. Would similar environmental conditions lead to functionally similar organisms or was the emergence of life on Earth a completely random event? And if so, was this event unique? This is partly discussed e.g. in this older Centauri Dreams guest article: https://centauri-dreams.org/2016/08/19/the-blue-spectres-of-abyssal-europa/. In other words, I really can’t say! Either way, those missions can constrain our hypotheses about the provenance of life in the universe…
ALL THESE WORLDS
ARE YOURS EXCEPT
EUROPA
ATTEMPT NO
LANDING THERE
-Arthur C. Clarke, 2010: Odyssey Two
I note a distinct lack of manned Jupiter missions over the past couple of decades…
Who would want to go there anyway? its a right Dive :)
This is the best compact article on a future planetary exploration mission that I have seen in forty years of reading the literature. The author balances clever ideas with the difficulties of implementing them, yet makes his presentation readable. If only everyone involved in planning such explorations could write this well.
Thanks a lot Michael! There are probably still some promising mission concepts and technologies that I missed, but will try to revisit in the future.
Could it be better to use a UV laser to decompose the ice, the gases given off could be used in a fuel cell to recoup energy when they get to the surface. As for plumes on enceledus could we not drop little discs onto the surface to catch plume material. This material could be analysed from orbit with a laser, the disc could have magnifying lens built on them to concentrate that laser light to do useful analysis.
Yes Michael, some in-situ resource utilization (or in this case re-utilization) might be useful to alleviate the challenges of these mission concepts. There are also some interesting ideas to use vehicles small enough to access the plume cracks directly.
A benefit of using UV to decompose the ice into gases would be a much smaller ‘drilling’ tip as there would be no need to bring the cable with the probe and there would be less refreezing issues. This concept could be tested out on Earth fairly easily perhaps in the Artic or lake Vostok.
Why would you use a nuclear reactor or isotope source to create heat, transform that heat into mechanical and then electrical energy via lossy processes, send it down a cable, only to… transform it back to heat? Why wouldn’t you put the nuclear generator on the tunneling probe, instead?
You make a good point Brett. However, especially considering the shallow melting case, one of the most important aspects is melting maneuverability. Using electric melting heads, the probe can melt around obstacles in the ice like meteoroids, cracks in the ice, ice blocks embedded in plume fallout etc. Then once near the target water pocket the melting can stop just sort of the assumed habitat. Such fine maneuvering would be more difficult by using nuclear heat sources. There are also some concerns about inserting nuclear material into these areas under the ice, although as I say in thew article they can probably be mitigated by enclosing the material in its typically used highly breach resistant container. As with everything in space engineering, a rigorous trade-off will be required for each application.
Of course you have to balance the increased engineering difficulties, vs the cost of twice as much plutonium to make up for the losses.
I’ll grant that electrical heating is a lot easier to prototype and test on earth. And you’d likely want to do a lot of testing on Earthly glaciers or ice caps before finalizing the design.
What if the base of the ice is where life has developed an ecosystem similar to the coral reefs. The animals could use the heat from the interior or chemicals and minerals that are released from the core to build a solid structure at the base of the ice. The water worlds that may exist on planets like those around Trappist 1 could even develop land masses by this process with reefs forming around volcanoes that poke thru the ocean as in the south pacific. Both the top and the bottom of the reefs could have there own ecosystems with some areas thick enough to support life on a solid surface above sea level. Just imagine the effect tides would have and the hot rocky cores volcanoes blowing gases and minerals into the ocean and the surface. With the possibility that these water worlds could have formed from super earths that had large atmospheres, the oceans may have large quantities of amino acids and abundant life. Could the earth’s life forms have have come from worlds like this, they may be the most common of all the worlds out there. (Ballistic Panspermia)
The ice-ocean interface reefs is a very interesting idea Michael. In this case we could conceivably study potential biospheres without necessarily navigating all the way to the ocean bottom.
DYNAMICAL AND BIOLOGICAL PANSPERMIA CONSTRAINTS WITHIN MULTI-PLANET EXOSYSTEMS.
“As discoveries of multiple planets in the habitable zone of their parent star mount, developing analytical techniques to quantify extrasolar intra-system panspermia will become increasingly important. Here, we provide user-friendly prescriptions that describe the asteroid impact characteristics which would be necessary to transport life both inwards and outwards within these systems within a single framework. Our focus is on projectile generation and delivery and our expressions are algebraic, eliminating the need for the solution of differential equations. We derive a probability distribution function for life-bearing debris to reach a planetary orbit, and describe the survival of micro-organisms during planetary ejection, their journey through interplanetary space, and atmospheric entry.”
https://arxiv.org/pdf/1802.04279.pdf
“the single most promising location in the solar system for the existence of life”
I would have surmised that alive or dead, I would be the single most promising location. Or, from your point of view, you. Etc. (Until complete disintegration or fossilization.)
Using conventional molecular cell biology we would be a setup to overlook xenobiology and xeno-nucleic acid forests (and perhaps even the equivalent of “Golden Arches”) while squinting down our detectors. Their very alien-ness could make their trees fail to register on our equipment.
Along those lines, this paper suggests that the first place we should look for alien life is right here on Earth:
https://www.mso.anu.edu.au/~charley/papers/DaviesetalShadow.pdf
Never-Before-Seen Viruses With Weird DNA Were Just Discovered in The Ocean.
Scientists have discovered a previously unknown family of viruses that dominate the ocean and can’t be detected by standard lab tests. Researchers suspect this viral multitude may already exist outside the water – maybe even inside us.
https://www.sciencealert.com/entirely-unknown-family-of-infectious-viruses-discovered-in-the-ocean-parasites-tail-less-autolykiviridae
New Ocean-Dwelling, Bacteria-Killing Tailless Virus Hid in Plain Sight.
https://www.livescience.com/61527-new-ocean-virus-identified.html
What!!!!???
Here is what we do: We get some comets into orbit around Jupiter, then merge, shape, and polish their ice into a giant reflective mirror. Then we focus sunlight onto a particular area of Europa’s surface into a tight beam to not only melt the ice to make an opening for any lander/submarine, but the light and heat will attract any aquatic creatures, making the probe’s job of finding Europan life easier.
Hey, if Trump can increase the annual DoD budget to 1.1 trillion dollars, NASA can ask for a few scraps from that table to fund such a mission, right?
Great article! I wonder about what such missions might tell us about the prevalence or lackthereof of life in the Universe. If alien microbes are found, then what might this tell us about the Fl term in the Drake equation? Similarly, if no life is found inhabiting the oceans of these moons, then what would this tell us about the value of Fl in the Drake equation?
Where can I get some pellets of Plutonium-238 so I can make a steam engine to power my car? I only need about 100 kg. :)
Europa Lander Mission Shut Out Again in 2019 NASA Budget Request
By Mike Wall, Space.com Senior Writer | February 13, 2018 07:23 am ET
A bold life-hunting mission to the surface of Jupiter’s ocean-harboring moon Europa was shut out yet again in the 2019 federal budget proposal, but NASA still aims to see it fly.
The budget request, which was released Monday (Feb. 12), allocates $19.9 billion to NASA in 2019 and lays out some details about the agency’s plan to return humans to the moon — a key focus that the Trump administration announced this past December.
The request axes five Earth-science missions and one high-profile astrophysics project, the Wide-Field Infrared Survey Telescope. It continues funding for high-profile planetary projects such as the Mars 2020 rover and Europa Clipper, a $2 billion multiple-flyby mission to the icy moon scheduled to launch in the 2020s — but, just like last year, there’s no money for the companion Europa lander that NASA is developing.
Still, NASA has every intention of seeing that lander fly, based on NASA Acting Administrator Robert Lightfoot’s remarks.
During his State of NASA address at the agency’s Marshall Space Flight Center in Alabama on Monday, Lightfoot took a rhetorical trip to 2030, imagining what NASA will have accomplished by then. Among the envisioned achievements:
“We will have explored Europa and be well on our way to landing a probe there and possibly found biological evidence of life elsewhere in our universe.”
Full article here:
https://www.space.com/39675-nasa-europa-lander-mission-2019-budget.html
Maybe a savior will appear from the commercial sector…
http://www.planetary.org/blogs/casey-dreier/2018/0208-how-the-falcon-heavy-could-revolutionize-exploration-of-ocean-worlds-1.html
Hope so, would work great to catch ‘Oumuamua!
Will Astronomers Be Ready for the Next ‘Oumuamua?
“When ‘Oumuamua showed up, she says, real-time communication on Twitter and other social networks glued the globe’s astronomers together, allowing them to rapidly acquire complementary data sets. But there might be another, more intimate way to learn about future ‘Oumuamuas. In a draft study now under peer review Laughlin and Yale doctoral student Darryl Seligman explored another possibility: smashing our next visitor with a probe.
“It ties really well into things that are being done anyway,” Laughlin says. In 2005 part of NASA’s Deep Impact mission plowed into Comet Tempel 1, ejecting some of the object’s innards into a debris cloud astronomers could study. Right now, NASA’s OSIRIS-REx mission is en route to Asteroid Bennu to retrieve a sample for return to Earth. And rocket technology is flourishing, as evidenced by SpaceX’s recent launch of the Falcon Heavy. If Pan-STARRS or LSST could spot an interloper and a mission like Deep Impact was ready and waiting to set off, something similar would be possible.
The trick would be catching it early. Astronomers found ‘Oumuamua on October 21, for example, but the easiest time to launch on an intercept course from Earth would have been early July. However difficult, though, such a mission would offer a unique chance, Laughlin says: “Getting in situ excavation of stuff from another planetary system is a pretty cool thing.”
https://www.scientificamerican.com/article/will-astronomers-be-ready-for-the-next-lsquo-oumuamua/?utm_source=feedburner&utm_medium=feed&utm_campaign=Feed%3A+sciam%2Fspace+%28Topic%3A+Space%29
Just hope no one is on-board!!!
Rare deep-sea creatures may use underwater chimneys to keep their eggs warm
by Sarah Kaplan
February 8
https://www.washingtonpost.com/news/speaking-of-science/wp/2018/02/08/rare-deep-sea-creatures-may-use-underwater-chimneys-to-keep-their-eggs-warm/
Re: a lander:
Is the surface ice constantly being resurfaced?
What is the condition of the surface ice after long-term bombardment by Jupiter’s radiation fields? Will that corrode the ice?
Self-Driving Robots Collect Water Samples to Create Snapshots of Ocean Microbes
Press Release – Source: MBARI
Posted March 8, 2018 9:34 PM
For the first time, scientists from the University of Hawai’i at M?noa (UH M?noa) and the Monterey Bay Aquarium Research Institute (MBARI) will deploy a small fleet of long-range autonomous underwater vehicles (LRAUVs) that have the ability to collect and archive seawater samples automatically.
These new robots will allow researchers to track and study ocean microbes in unprecedented detail.
http://astrobiology.com/2018/03/self-driving-robots-collect-water-samples-to-create-snapshots-of-ocean-microbes.html
A late addition to the article: there is an excellent paper by B. Sherwood of JPL on what a roadmap for the exploration of the Enceladus (also as a template for the exploration of the other icy moons) would look like. The paper can be found here: https://www.sciencedirect.com/science/article/pii/S0094576515302642 (not openly available though).
Very good news regarding the FY 2018 NASA budget:
http://www.planetary.org/blogs/casey-dreier/2018/20180322-fy18-omnibus.html
Quoting in particular:
And then there’s Europa, the mission The Planetary Society and its members have worked so hard to support over the years. It stands to receive $595 million in 2018, not just for the Clipper spacecraft, but for work on a lander as well. The legislation reiterates that the mission launch in 2022 on a Space Launch System rocket. NASA has stated it wants to launch the Clipper in 2025 on a commercial rocket.
And get this:
A Mars helicopter that could ride along with the upcoming Mars 2020 rover is funded at $23 million.
House bill keeps Europa Clipper on track despite launch vehicle uncertainties
by Jeff Foust — May 10, 2018
WASHINGTON — A House funding bill approved by an appropriations subcommittee May 9 will help keep a mission to Jupiter’s moon Europa on track for a launch in 2022.
The commerce, justice and science (CJS) subcommittee of the House Appropriations Committee approved a spending bill on a voice vote after a brief markup session that made no changes to the legislation, introduced a day earlier. The bill now goes to the full appropriations committee for consideration as soon as next week.
The bill provides more than $21.5 billion for NASA in fiscal year 2019. It specifically includes $545 million for Europa Clipper, a mission to orbit Jupiter and perform multiple flybys of the icy moon Europa, which scientists believe is potentially habitable. The bill also includes $195 million for a follow-on lander mission.
Full article here:
http://spacenews.com/house-bill-keeps-europa-clipper-on-track-despite-launch-vehicle-uncertainties/
To quote:
At the May 9 markup, Culberson passed around a scientific paper with involving a new discovery about Europa and the existence of plumes that offer additional proof that the icy moon has a subsurface ocean of liquid water.
“It’s worth noting that the scientific journal Nature Astronomy just reported that the Galileo mission, back in 1997, flew through a water plume on Europa a thousand kilometers thick. So, the ocean of Europa is venting into outer space,” he said. “The science community has wanted to go there for years, Mr. Chairman, and this bill makes that happen.”
“Just in case I hadn’t seen it?” the full committee’s chairman, Rep. Rodney Frelinghuysen (R-N.J.) asked, looking at the paper. “There it is,” Culberson responded.
As it turns out, the paper in question had not been published yet, and the journal had embargoed its release until May 14.
My question: Someone at NASA sat on this information that Europa does have at least one active geyser for 21 years WHY?! Someone please enlighten me on this matter.