That small spacecraft can become game-changers, our topic last Friday, is nowhere more evident than in the success of Rover 1A and 1B, diminutive robot explorers that separated from the Hayabusa2 spacecraft at 0406 UTC on September 21 and landed soon after. Their target, the asteroid Ryugu, will be the site of detailed investigation not only by these two rovers, but also by two other landers, the German-built Mobile Asteroid Surface Scout (MASCOT) and Rover 2, the first of which is to begin operations early in October. Congratulations to JAXA, Japan’s space agency, for these early successes delivered by its Hayabusa2 mission.
Surface operations will be interesting indeed. Both rovers were released at an altitude of 55 meters above the surface, their successful deployment marking an advance over the original Hayabusa mission, which was unable to land its rover on the asteroid Itokawa in 2005. Assuming all goes well, the mission should gather three different samples of surface material for return to Earth in 2020. The third sample collection is to take advantage of Hayabusa2’s Small Carry-on Impactor (SCI), which will create a crater to retrieve subsurface material.
Why Ryugu? The object is a carbonaceous asteroid that has likely changed little since the Solar System’s early days, rich in organic material and offering us insight into the kind of objects that would have struck the Earth in the era when life’s raw materials, along with water, could have been delivered. It has also proven, as the JAXA team knew it would, a difficult landing site, with an uneven distribution of mass that produces variations in the gravitational pull over the surface.
On that score, it’s interesting to note that the Hayabusa2 controllers are sharing data with NASA’s OSIRIS-REx mission to asteroid Bennu. Likewise a sample return effort, OSIRIS-REx will face the same gravitational issues inherent in such small, irregular objects, which can be ameliorated by producing maps of each asteroid’s gravity. The three-dimensional models produced for the Dawn spacecraft at Ceres are the kind of software tools that will help both mission teams understand their targets better and ensure successful operations on the surface.
But back to Rover 1A and 1B, which have landed successfully and are both taking photographs and sending data, the first time we have landed and moved a probe autonomously on an asteroid surface. Although the first image was blurred because of the rover’s spin, it did display the receding Hayabusa spacecraft and the bright swath of the asteroid just below. Here’s JAXA’s mission tweet of that first image.
This is a picture from MINERVA-II1. The color photo was captured by Rover-1A on September 21 around 13:08 JST, immediately after separation from the spacecraft. Hayabusa2 is top and Ryugu's surface is below. The image is blurred because the rover is spinning. #asteroidlanding pic.twitter.com/CeeI5ZjgmM
— HAYABUSA2@JAXA (@haya2e_jaxa) September 22, 2018
Says Tetsuo Yoshimitsu, who leads the MINERVA-II1 rover team:
Although I was disappointed with the blurred image that first came from the rover, it was good to be able to capture this shot as it was recorded by the rover as the Hayabusa2 spacecraft is shown. Moreover, with the image taken during the hop on the asteroid surface, I was able to confirm the effectiveness of this movement mechanism on the small celestial body and see the result of many years of research.
The ‘hop’ Yoshimitsu refers to is a reference to the means of locomotion the rovers will use on the surface. Remember that these vehicles are no more than 18 centimeters wide and 7 centimeters high, weighing on the order of 1 kilogram. In Ryugu’s light gravity, the rovers will make small jumps across the surface, a motion carefully constrained so as not to reach the object’s escape velocity. Below is the first Rover-1A image taken during a hop.
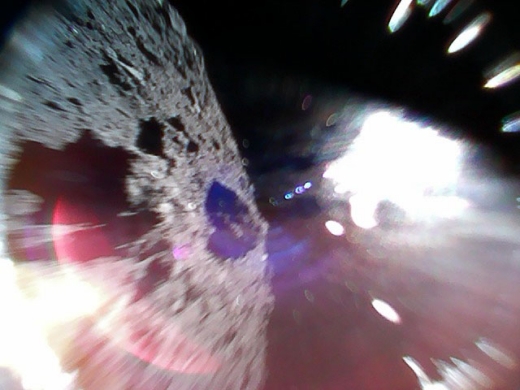
Image: Captured by Rover-1A on September 22 at around 11:44 JST. Color image captured while moving (during a hop) on the surface of Ryugu. The left-half of the image is the asteroid surface. The bright white region is due to sunlight. Credit: JAXA.
And have a look at an image taken during landing operations before Rover-1B reached the surface. Here the asteroid terrain is clearly defined.

Image: Captured by Rover-1B on September 21 at around 13:07 JST. This color image was taken immediately after separation from the spacecraft. The surface of Ryugu is in the lower right. The coloured blur in the top left is due to the reflection of sunlight when the image was taken. Credit: JAXA.
Yuichi Tsuda is Hayabusa2 project manager:
I cannot find words to express how happy I am that we were able to realize mobile exploration on the surface of an asteroid. I am proud that Hayabusa2 was able to contribute to the creation of this technology for a new method of space exploration by surface movement on small bodies.
I would say Tsuda’s pride in his team and his hardware is more than justified. As we go forward with surface operations, let me commend Elizabeth Tasker’s fine work in spreading JAXA news in English. Even as JAXA offers live updates from Hayabusa2 in English and the official Hayabusa2 site offers its own coverage, Tasker, a British astrophysicist working at JAXA, has provided useful mission backgrounders like this one, as well as running the English-language Hayabusa2 Twitter account @haya2e_jaxa, and keeping up with her own Twitter account @girlandkat. There will be no shortage of Ryugu news in days ahead.


Congratulations to JAXA and University of Tokyo, Koichi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University and more, for an achieved milestone in your daring mission!
More news and information on this historic event:
http://www.spaceflightinsider.com/organizations/jaxa/japan-successfully-lands-two-small-rovers-on-asteroid-ryugu/
https://apod.nasa.gov/apod/ap180924.html
In the APOD page above, there is a link to a very informative interview with Hayabusa 2 Project Manager Hitoshi Kuninaka:
http://global.jaxa.jp/article/2014/interview/vol88/
Congratulations indeed. Quite an extraordinary mission. With 3! rovers. Each with very unusual locomotion. And 2 explosive events. One with 4.5kg HDX!!! Hopefully no fragments hit mission hardware.
On the slightly down side, the Minerva photos are really pretty terrible from today’s standards. Hopefully there will be better ones.
“photos are really pretty terrible”
Even though so many top-brand cameras are “Made in Japan”.
Let me know when you have sent rovers to a planetoid and returned images of its surface from them.
Correction: HMX. Was thinking of RDX.
Regarding ejecta avoidance, Hayabusa should be shielded by Ryugu during impact. In order to get photos of the action, the battery driven DCAM3 (deployable camera)will be detached and will loiter above the target and subsequently transmit it’s data to Hayabusa.
JAXA has again come up with an innovative design. Their solar sail IKAROS used panels that changed reflectivity to steer, a novel approach compared to earlier US designs that used steerable subsails.
The Hyabusa2 robots propel themselves by “hopping” using an internal motor to move masses and generate torque. Simple, and hopefully effective for traversing the very low gravity of Ryugu. The 3 rovers should provide some redundancy for any single failures. Recall that the Philae lander on the Rosetta probe failed after its anchors failed to deploy correctly and the lander tumbled into a shadowed area preventing recharging of its batteries.
Let’s hope the samples are collected and that we get the data after they return to Earth in 2020.
Philae’s harpoons failed because they were not tested properly. One reason was due to a visiting dignitary messing with their test schedule.
That may be, but the point is that there will always be a single point of failure. Redundancy, preferably with independent systems, is the best antidote. For example, the Shuttle had separate computers, programmed differently to confirm calculations.
If we bend the biology analogy, a big, expensive device is a K strategy, whilst using many, cheap devices is an r strategy. The Hyabusa2 rovers are an r strategy. When we talk about swarms of low cost devices, like the Breakthrough Starshot approach, or the proposed swarm of orbiting internet satellites, we are again talking r strategy.
Yes, but if there is going to be a reason for failure in a space probe, especially an interstellar one, let it not be because someone felt they had to schmooze and suck up to some self-labeled VIP who probably had little knowledge of what was going on and quickly forgot the visit shortly thereafter.
Translation: If they are not an integral part of a space mission, they should not be there. Or at least put them somewhere in the facility where they cannot cause any damage.
NASA really impresses with its endless contingency considerations during mission planning. It’s something no other space agency does as well.
Philae’s failure to anchor really angered me because rightly or wrongly I immediately thought, lax planning. And now money is being thrown at CAESAR to get the job done when the funds could have instead gone to another mission. Venus. Enceladus. Oh well. Anyway, your story about the dignitary sounds like a pretty flimsy excuse. Still like to read about it. Do you have a link?
Sadly, no. It was relayed to me in confidence by some folks who are usually in touch with such matters. So I cannot prove my statement. It is not much of a stretch to say, however, that testing the harpoon system on Philae was indeed less than adequate.
Now I am hearing rumors that the two Hayabusa 2 rovers stopped transmitting right after touchdown, which is why we have not received any more images or data since last Saturday. I hope these rumors are just mistaken speculation.
Speaking of CAESAR, check out this detailed article from this week’s Space Review on that comet sample return mission versus the Titan Dragonfly drone:
http://thespacereview.com/article/3574/1
My vote is definitely for Titan.
Speaking of the European Space Agency (ESA) and visiting dignitaries, I distinctly recall watching the live presentations of their Huygens probe landing on Titan in January of 2005.
I and those around me were frustrated at how much time the ESA spent showing the folks and VIP involved congratulating and thanking each other compared to displaying images of the moon from the probe, both during descent and after landing. I would like to think they have improved their PR thirteen years later.
Here is a technical reason for the Philae harpoon failure:
http://txchnologist.com/post/102624788755/philae-harpoon-failure-suspect-propellant-that
Thanks. Yes, ESA press events are drearily long(winded) speech affairs with way too little time devoted to data presentation. And those presentations are too often shoe string affairs and acustically opaque due to heavy accents. I wish ESA would allow the project scientists to present in their native languages. At least some of us would then understand them!!^_^
Either that or they wear incredibly inappropriate shirts to their press conferences:
http://www.cnn.com/2014/11/13/living/matt-taylor-shirt-philae-rosetta-project/index.html
https://www.theverge.com/2014/11/13/7213819/your-bowling-shirt-is-holding-back-progress
And this…
https://www.theguardian.com/science/2014/nov/13/why-women-in-science-are-annoyed-at-rosetta-mission-scientists-clothing
good job !!
ESA Choosing cubesats companions for Hera asteroid mission
Happy News! More rover images plus the first video from the surface of Ryugu!
https://www.bbc.com/news/science-environment-45667350
The latest batch of images from Hayabusa 2 and the Rovers (band name idea right there):
http://www.planetary.org/blogs/jason-davis/2018/minerva-latest-pics.html
To quote:
Hayabusa2 is also scheduled to release a lander called MASCOT on Wednesday, October 3.
This is for the dinosaurs! Who we only much later learned had evolved into birds, so…
http://www.planetary.org/blogs/guest-blogs/hitting-back-dart.html
This is for Tunguska! Which somehow didn’t apparently kill anyone. Actually, how do we know that? I mean, did the Russians/Soviets ever really check with all the folks living in the remote tundra?
Preparing to drop land the next rover, MASCOT:
https://www.leonarddavid.com/japans-hayabusa2-next-asteroid-lander-set-for-deployment/
You know the more I look at these images the more it looks like someones rubble pile from a mining operation. In fact looks like someone left their calling card!
https://pbs.twimg.com/media/DokxMWfXkAAxHYf.jpg
Hayabusa 2 did drop landing markers on Ryugu ahead of the rovers to make sure they actually landed on the space rock. Hayabusa 1 tried something similar over a decade ago and missed its celestial target.
However, these markers do not look like rectangular boxes:
http://www.planetary.org/blogs/jason-davis/hayabusa2-samples-names.html
The Planetary Society blog has more news on MASCOT, including a film from Hayabusa 2 of the box-shaped rover falling towards the surface of Ryugu!
http://www.planetary.org/blogs/emily-lakdawalla/2018/mascot-landing-on-ryugu-successful.html
My mistake – Hayabusa 2 WILL drop those target markers when the orbiter makes its attempt to land and sample some of Ryugu next year.
RIP, MASCOT: Hopping Lander Meets Its End on Asteroid Ryugu
By Mike Wall, Space.com Senior Writer | October 4, 2018 01:42pm ET
https://www.space.com/42024-asteroid-ryugu-mascot-lander-mission-ends.html
To quote:
We could see one more hopper deploy from Hayabusa2: The orbiter also carries an “optional” explorer called MINERVA-II2, which is about the same size as the 2.4-lb. (1.1 kg) MINERVA-II1 duo. MINERVA-II2 was built by a consortium of Japanese universities; the MINERVA-II1 pair were provided by JAXA and the University of Aizu.