Is seeding life into the universe to be a part of the human future? Space probes conceivably could be doing this inadvertently, and the processes of panspermia also may be moving biological possibilities between planets and even stars. Robert Buckalew has his own take on what humans might do in this regard, as discussed below. Robert has written fiction and non-fiction since 2013 under the pen name Ry Yelcho for the blog Yelcho’s Muses. In 2015 he received the Canopus Award for Excellence in Interstellar Fiction from 100 Year Starship for the story “Everett’s Awakening.” His short story “The Interlopers” appears on Literally Stories. What follows draws on his speculative science article “Microbots—The Seeds of Interstellar Civilization,” which was awarded the Canopus Award for Original Non-Fiction. The essay that follows is based on his presentation at the Icarus Interstellar Starship Congress 2019.
by Robert Buckalew

The series of pivotal events that led to the development of intelligent life on Earth are so numerous and seemingly random that the occurrence of intelligent life at other places in the galaxy may be very rare. The chance extinction of the dinosaurs which led to the diversification and opportunistic evolution of mammals is but one of many such events. Assuming the extraordinary rarity of this occurrence elsewhere in the galaxy should be a compelling reason for humans to presume our gifts of intellect exceptional and assume the obligation to prevent this cosmic largess from vanishing through global natural disaster, nuclear war or self-made neglect. Even if intelligent life is found to be common in the universe, it is certain that our form of intelligent life is unique. If we wish, someday, to communicate and interact with these various sentient species and contribute our singular human culture to their diverse communities, we must project our species’ existence into cosmic time frames.
The creation of dispersed, self-sufficient human settlements both interplanetary and extra-solar is the best way to ensure our long term survival as a species. Because of the unimaginable distances to other star systems, most proposals for interstellar colonization involve large multi-generational starships, warp drives or wormholes. Although common plot devices to create science fiction stories, wormholes and warp drives appear unworkable travel methods given the constraints of known physics. Multi-generational starships come with their own technological, political, biological, social and psychological challenges that make their realization daunting to consider.
Nature, however, has developed efficient methods to spread life on Earth that could be employed for interstellar colonization. Engineered Exogenesis, modeled after successful natural processes, proposes a method to spread Earth-life throughout our local stellar neighborhood.
Exogenesis, in astrobiology, is the hypothesis that life originated elsewhere in the universe and was conveyed here to Earth. For example, there is evidence that life in our solar system originated on Mars and was brought to this planet aboard a meteorite. The plausibility of Earth-life having been transplanted is supported by our inability to create spontaneous life from primordial organic chemicals in the laboratory and by the fact that there is no known remnant of pre-genetic life on Earth.
Engineered Exogenesis will use an additional strategy derived from nature. The survival system used by plants, insects and many aquatic lifeforms is based on the overproduction of seeds, larvae or spores in order to overcome their natural failure rate. Mass produced microbots can be designed to intentionally deliver engineered genetics to prospective exoplanets in numbers sufficient to assure that some will likely reach their destination and survive. As with seeds, this may require the dissemination of thousands to millions of them, based on the projected failure rate of the delivery system and the expected germination rate.
We know that water and organic compounds, known as tholins, have been found on planets, moons, comets and asteroids throughout our solar system. These precursors for life are believed to exist on interstellar comets and asteroids as well. Planetary exo-systems are expected to offer a similar fertile environment ready for the introduction of earthly genetic material.
The major components of an Engineered Exogenesis system might include 1) a microbiotic vessel that travels to the extra-solar planet, 2) a space-based magnetic accelerator capable of providing the inertial energy to send the vessel to other solar systems, 3) a space-based laser providing communication and supplemental energy for solar sail navigation and maneuvering, and 4) the engineered genetic material capable of growing a bio-robotic agent on the exoplanet to prepare the planetary environment for humans.
The Microbot
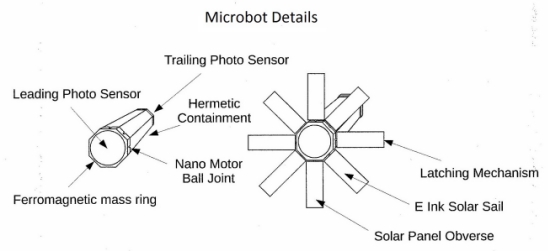
The microbiotic vessel, hereafter referred to as the microbot, would transport hermetically encapsulated, genetic material to the destination exoplanet while providing radiation, magnetic and acceleration protection. This vessel would be designed to open in the presence of liquid water, deploy a biobot zygote and, if necessary, a photosynthesizing food source such as phytoplankton or other aqueous plant food. The engineering of the microbot would incorporate nano technology, bio-robotics, AI and neural networks. It could be very small, possibly the size of a grain of rice, and constructed of low mass materials to minimize the energy required for acceleration. Construction materials might include carbon fiber, graphene or Kevlar designed to withstand the high magnetic fields and high acceleration rates and to provide heat shielding for atmospheric entry. Microbot vessels would possess no on-board propulsion using only their initial inertial energy for space travel. A ferromagnetic mass at the leading end of the vessel would be required for magnetic acceleration and inertial stability. This mass might be separated for deceleration upon arrival at the planetary system or retained for atmospheric entry shielding.
Microbots would also use leading and trailing photo-sensors for navigational aids with the leading photo-sensor directed at the destination star and the trailing sensor pointed at Sol. Fore and aft modulated, bio-luminescent lasers would provide communication between traveling microbot ships reminiscent of fireflies on a summer night.
A series of pivoting, flat panels would be extended following launch. Each panel would use one side for solar energy collection. Solar electric storage might be achieved by capacitance of the microbot body. The obverse side, capable of adjustable reflectivity, would be used as a solar sail. The panel ends would also be capable of latching with other microbot panels for the creation of microbot arrays, connected clusters of individual microbots. A powdered iron substrate layer which would become magnetized during acceleration could aid in microbot arraying and later become a magsail for magnetic braking. A superconducting loop for magnetic braking could be incorporated into the perimeter of the solar panels or otherwise deployed as an independent loop. Finally, the panels could be positioned for autogyro aerobraking during atmospheric entry in the same way maple seeds can dissipate energy by helicoptering to Earth.
The Accelerator
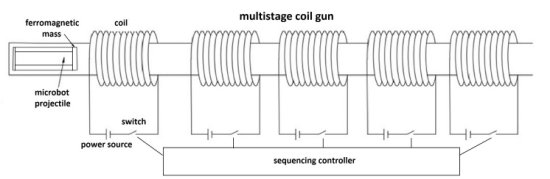
Magnetic acceleration happens by activating each electromagnet ahead of the projectile to pull it forward. As the projectile accelerates, the rate of coil activation increases to stay ahead of the accelerating mass. Projectile acceleration would be limited by the inertial mass of the projectile and the force produced by the electromagnets. Magnetic accelerators can include a circular or linear motor configuration.
Aimed at the destination star, the microbots would be accelerated sequentially for a maximum exit velocity with a minimum energy expenditure. This must be a space based as the atmospheric heating from the very high exit velocity precludes microbots being launched from Earth. By timing the sequencing of the magnets the rate of acceleration can be optimized for the given projectile mass and the vulnerability of the vehicle and payload to the forces of acceleration. The length of a linear accelerator is inversely related to the acceleration needed for a given exit velocity – the longer the coil gun, the less acceleration needed. A circular, toroidal accelerator would not have this length constraint as it could use multiple cycles to obtain projectile terminal velocity. Once the system is deployed it could be used for numerous target stars. If microbots can be accelerated to 10% light speed, a trip to Alpha Centari (4.37 light years away) would take 43 years and a trip to Tau Ceti (10.4 light years away) would take 104 years. Reaching these speeds would be a function of the length and power of the accelerator and the mass of the microbot ship.
The Laser
The laser is not for propulsion, as suggested by Yuri Milner’s Breakthrough Starshot, but would be used for communication and programming updates by modulation of the laser beam. It could also provide energy for course correction and arraying maneuvers. It is also best located in space to reduce atmospheric light scattering.
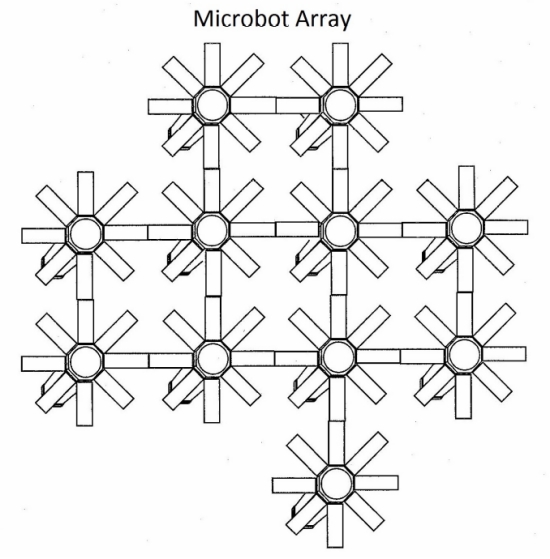
Arrays
Microbots would be programmed to array although some microbots would necessarily remain as self sufficient individual ships. The primary purpose of arraying is to improve communication with Earth as a larger antenna area can enhance both transmission and reception performance. However, arraying may also be used to collectivize the solar power and energy storage and to organize the use of this power.
Implementing Arrays
Microbot arraying could be achieved through use of swarm intelligence, a naturally occurring function among social insects, migrating birds and fish schools. Known in robotics as distributed AI, microbots could communicate with each other while traveling in space through their fore and aft photo-sensors and modulated bio-luminescence. As the trip may take 100 years or more, there should be adequate time for arraying even considering the limited maneuvering power provided by the angular incident positioning and variable reflectivity of their panels. Although launched individually, the first vessels would be accelerated at a slower velocity than the later vessels causing their clumping in space as they travel and increasing their ability to form arrays.
Microbots Arrival and Descent to the ExoPlanet
Deceleration from near relativistic speeds to that of planetary orbit velocity is always problematic. Explosive ejection of the leading ferromagnetic mass could substantially decelerate the containment vessel while reducing the remaining microbot maneuvering mass. Employing the resistance of the reflective solar sails and the magsail, braking and maneuvering could be achieved by using the retrograde radiant photon pressure, plasma energy streams and charged magnetosphere of the destination star. Solar and magnetic braking could continue after entering an elliptical orbit of the star, until a matching planetary orbital velocity is obtained. With aerobraking the arrays could go from an elliptical orbit of the planet to a circular one. For the solitary microbots aerobraking would slow them for atmospheric entry.
Microbots entering the atmosphere would experience further braking through atmospheric drag. With reduced velocity, low gravitational attraction and high surface-to-mass ratios, atmospheric entry damage to the microbots might be kept to a minimum. Descent might be further dampened and controlled by positioning the panels for autogyro energy dissipation.
Engineered Genetic Materials
Genetics has become a game-changing technology allowing for man-made biological creativity. Genetic engineering has been revolutionized through CRISPR and the creation of artificial life by scientists like Craig Venter. Expanding the genetic alphabet beyond the 4 chemical bases found in DNA could add functions capable of assembling metal or silicon components into planet inhabiting biobots.
Although the microbot starship incorporated some bio-robotic functions such as neural networks and bio-luminescence for communication, it did not need the biobot ability to grow and reproduce. The biobots used for planetary exploration, terraforming and habitat construction would be grown from the genetic material in the microbot after acquiring a suitable watery environment for germination/gestation. These bio-life forms would be genetically designed to be suitable for the anticipated planetary environment but might also incorporate a greater degree of robotics into their biology for laser communication with Earth and reprogrammability.
Essential BioBot Characteristics
The first terrestrial biobots might best be designed to be amphibious for food access and terrain mobility and cold blooded for temperature tolerance. They might be capable of solar power or photosynthesis for their energy, but separate genetic material may be included to produce a photosynthesizing food source for the biobots.
Their instinctive behavior would include a work activity for communication and infrastructure building similar to instinctive nest, hive or web building found with Earth life. Their behaviors would be re-programmable from Earth allowing task changing capability. For this they would require a means to transmit and receive laser modulated signals with Earth as well as their interspecies communication using sound or light modulation.
Reproduction could be biological though it would likely be asexual. Reproduction would also be programmable through Earth communication in order to create a series of diverse offspring, specifically-tasked and specialized biobots. Eventually there would be terraforming for human habitation. After successful habitat construction and terraforming, the final genetic download would be human genomes for incubation. This would require specialized biobots for human gestation and nurturing. These humans could be genetically designed for the gravity, atmosphere and temperatures of the exoplanet by adjusting metabolism rate, body mass, lung capacity, skin color, fat, fur covering, etc. These modifications would prognosticate natural changes which would have evolved over time in humans in adapting to their new environment.
The simpler alternative to the more complex remote reproductive reprogramming would be to send sequential waves of microbots each containing subsequent genetics. However, the advantages of remote genetic reprogramming would not only result in faster colonization, but the genetic developments during the 100+ year microbot travel time could be incorporated in the transmitted genetic code.
Advantages of Engineered Exogenesis
There are some obvious advantages that come with with an Engineered Exogenesis approach to interstellar colonization. It would be scalable, specifically, the numbers of microbots manufactured and launch frequencies can be adjusted to suit political or financial circumstances. It would not be limited to one target planet, and any number of planets or newly discovered planets or moons could be added as targets over time. It would be tested in our solar system and modified with improvements before deployment. The seeding and growth of biobots could take place on Earth or in domed environments on the moon or Mars. Finally, it reduces the time scale for starship colonization, and eliminates human exposure to space travel. It, however, it lacks the drama and romance found in human adventure stories in space.
For Engineered Exogenesis to become a reality there are many technical problems to be resolved as well as numerous ethical issues to be considered such as the chauvinistic imposition of our genetics onto other evolving planetary systems, the creation and dissemination of synthetic, reproducing life forms and the alternation of our own human genome. Society, so far, has been accepting of test tube babies, GMO food crops and gene therapy, especially when it seems to improve our lives. Such controversial technological impositions may also be accepted as necessary in order to achieve a human interstellar presence.
Has This Happened Before?
If Engineered Exogenesis is a viable idea, would it not have been done by advanced alien civilizations? If so, why are there no alien biobots roving around on Earth? This is like the Fermi Paradox about space aliens. If they were sent here, maybe ocean Earth life feeds on these undeveloped alien genomes before they grow and reproduce. Possibly life on Earth is the result of an alien exogenesis. Then where are the microbot ships that carried them? They would be tiny, widely scattered and hard to find. Possibly the nascent search for micrometeorites on Earth may yet find one of these artificial nanobots.
References
1. Michael Noah Mautner, “Seeding the Universe with Life: Securing Our Cosmological Future,” The Interstellar Panspermia Society. http://www.panspermia-society.com/
2. N. Mathews, A. L. Christensen, R. O’Grady, F. Mondada, and M. Dorigo, “Mergeable nervous systems for robots,” Nature Communications 8(439), 2017 (full text).
3. Jennifer Doudna, “How CRISPR lets us edit our DNA,’ TED Talk September 2015. https://www.ted.com/talks/jennifer_doudna_we_can_now_edit_our_dna_but_let_s_do_it_wisely?language=en
4. J. Craig Venter, “Watch me unveil ‘synthetic life,'” TED talk. May 2010. https://www.ted.com/talks/craig_venter_unveils_synthetic_life?language=en
5. Daniela Rus, “Autonomous boats can target and latch onto each other,” MIT News June 5, 2019. http://news.mit.edu/2019/autonomous-robot-boats-latch-0605
6. Sarah Hörst, “What in the world(s) are tholins?” Planetary Society July 22, 2015. http://www.planetary.org/blogs/guest-blogs/2015/0722-what-in-the-worlds-are-tholins.html
7. Francesco Corea, “Distributed Artificial Intelligence: A Primer on Multi-Agent Systems Agent Based Modeling and Swarm Intelligence,” https://www.kdnuggets.com/2019/04/distributed-artificial-intelligence-multi-agent-systems-agent-based-modeling-swarm-intelligence.html
8. Paul Gilster, “Starship Surfing: Ride the Bow Shock,” Centauri Dreams March 21, 2012 https://www.centauri-dreams.org/2012/03/21/starship-surfing-ride-the-bow-shock/


I’m sorry, but I regard this as a terrible idea, albeit a most ingenious one to be sure. The analogy that most readily springs to mind is “crapping all over the cosmos”.
It’s a serious case of putting the cart before the horse. Let’s launch similarly-engineered microprobes with heavy duty analytic capability for life existence first, shall we?
“Crapping all over the cosmos”?
There’s no place for self-hate here, the meaning in that statement.
I’m more for building artificial self-contained worlds but this is also a good idea. The imperatives in life are survival and expansion, and we just don’t yet know if there’s actually any other life out there. We can deal with the situation if we detect it.
Meanwhile we need to quit looking for more advanced types to come “save” us and get to work using what’s in our area.
Of course, one challenge will be to miniaturize not just the microprocessors, but also the manufacturing process itself.
“The plausibility of Earth-life having been transplanted is supported by our inability to create spontaneous life from primordial organic chemicals in the laboratory and by the fact that there is no known remnant of pre-genetic life on Earth.”
I don’t understand the logic of this statement. How does our current ability level of creating prebiotic protocells support the concept of exogenesis? This same argument is used in support of creationism but fails for the same reason. Our current ability level is just our current ability level. The lack of pre-genetic life is better evidence of exogenesis but we would have to make the case that a pre-genetic ecosystem could survive in the presence of a vastly more capable and energetic ecosystem of genetic life.
Well… I would be more cautious with that sentence, but I understand the reason behind.
If travel between planets and even stars is faster and high probability, you don’t have to consider the probability of life to appear on just one planet but a galaxy region as a whole because travel goes from one place to another.
A lot more probable this way.
And different planets can have different conditions, so a low probability planet for life to appear but enough conditions for life to thrive could adopt alien life and make the first step a lot easier.
Earth has born two times in fact, because the impact of Theia (according the most probable hypothesis). So there is plenty of times for life to occur on more pleasant place in the solar system even “first Earth”, and life travel between planets (ancient Venus or Mars) and return to Earth.
But assuming that life is so endurable means that it should remain on other places of the Solar System. Alien life, but from a common origin with Earth life.
We will see in the future with deep exploration on the solar system. If life remains and has a common origin, that will means that panspermia should be common in the galaxy.
I would agree that the probability will rise. Whether it rises sufficiently so that one can use the term “common”, idk. Some while ago, there was a post on CD that suggested interstellar panspermia would be of extremely low probability. Whether one agrees with that analysis or not, it certainly is contentious.
Zubrin posted on CD that he thought panspermia from Earth to Mars was so common that it made a nonsense of planetary protection. Hardly a surprising position given his zeal for human colonization of Mars asap. Ironically, it may take a human presence on Mars to do the needed work to determine if there is extant life, probably below the surface.
I would be very happy if we detect unambiguous biosignatures on some exoplanets. It would imply life is not restricted to Earth and would offer a future of discovery lasting many lifetimes. Conversely, if all exoplanets proved to have no indication of life, then it might well become an imperative for Earth to spread its life throughout the galaxy, and beyond.
In the October 19’th post: “Artificial Singularity Power: A Basis for Developing and Detecting Advanced Spacefaring Civilizations.” I commented the following: “`Oumuamua…DELIBERATELY HEADED HERE…And to top it off, in all likelihood, due to the close passage to Earth, WE HAVE BEEN SEEDED!!!!” to which ljk replied: Seeded with nanobots? Why?” Robert Buckalew’s article is a WHOLE LOT BETTER RESPONSE THAN MINE WAS! Which leads me to the following paper: “On the interstellar Von Neumann micro self-replicating probes.” This is now a MUST READ for anyone who just read Robert Buckalew’s article here. FINALLY: This paper is currently up on the exoplanet.eu website. “Alternative standard frequencies for interstellar communication.” by C Sivaram, Kenneth Arun, O. V. Kiren. I hit paywall. If any reader is either willing to pay, or is clever enough to find their way around this, please do so, read the entire paper, and then PLEASE post these alternative frequencies in a reply to this comment. I would appreciate that so much. Thank you!
It’s in the usual repository.
1. There’s so much speculative science here I first thought “Why not just build a wormhole?”
2. So will this biology be programmed to send home “Whoops” and commit mass suicide if it comes in contact with life?
3. Might this not be considered an invasion should there be intelligent life there?
4. Seems like a fertile area for some sci-fi, e.g. when the various branches of humanity and its offsprings come in contact.
5. Which is not to say it shouldn’t be considered.
The seeds of life: https://www.youtube.com/watch?v=5XyNe8UESTs
We should not do any deliberate seeding of Earth life to other worlds, and should do what we can to prevent any accidental transfer of Earth life.
We know nothing about life that may exist outside of Earth. From that life’s perspective any seeding of Earth life might well appear like a combination of “Invasion of the Body Snatchers” and the “Andromeda Strain”. Furthermore, there are many important scientific questions that can only be answered by studying natural occurrences of life on many worlds. If every place we can study has already been seeded with Earth life, we may never be able to find out if there are alternate biochemistries, if life appears commonly or rarely, if natural panspermia occurs, and on and on.
Seeding Earth life to other worlds would be a moral and scientific catastrophe.
There is huge ethical flaws in this idea, and in reality it is not about colonization, but about bio pollution of space.
Will Homo Sapiens be happy if some ETI civilization send to the Earth swarm of bio-robots polluted by some type of “space anthrax” dedicated to Engineer of evolution? I am sure not…
Thanks to Great Physics Laws this project is not implementable by way it is described…
This is essential.
I can just see it now, the Klingons consider it an act of war and annihilate the race that sent them.
Good thing the Klingons are fictional characters. Besides, they become allies with the Federation later on.
If an ETI with interstellar capabilities wanted to consider us a threat, they would not wait until we sent seed ships to their worlds. Interstellar societies not big on sharing galactic resources and territory would seek out alien civilizations with either the capabilities or potential for interstellar travel and colonization and annihilate them remotely.
One relatively simple method to take out all life on an Earth-type planet is to send projectiles at relativistic speeds. The kinetic energy from the impact alone will sterilize the planet’s surface.
See here:
https://en.wikipedia.org/wiki/The_Killing_Star
and here:
http://www.projectrho.com/public_html/rocket/aliencontact.php#id–Lack_of_Aliens_To_Contact–The_Fermi_Paradox–The_Killing_Star
and here:
http://www.projectrho.com/public_html/rocket/spacegunexotic.php#id–Relativistic_Weapons–The_Killing_Star
A more advanced method might be using a Dyson Shell as a mega beam weapon:
https://orionsarm.com/eg-article/48fe49fe47202
https://www.artstation.com/artwork/ybElkQ
This would make a good SciFi story with the theme of “A cautionary tale”.
The argument of Earth being seeded by exobiology was neatly shown to be flawed by Harold Shaw’s comment above. No more needs are said on that matter.
The idea that biobots with engineered genes are in any way “spreading Earth life” is to stretch the definition of Earth-life. The proposed engineered DNA is the stuff of needed tight control, not free dispersal in an environment.
I note that these biobots are not preceded by probes to determine if life already exists on the target planet. This would seem to be a requirement to ensure such planets are not living before any new form of life was introduced. The approach taken is almost like the “gray goo” or “paperclip” argument of uncontrolled AI.
The concept assumes almost magic fairy dust to work. One can certainly understand sending unicellular organisms like bacteria, algae, and protists. But the approach assumed that multicellular organisms can be sent as as DNA which earlier bots can gestate in artificial wombs and presumable socialize these ultimately “[post]humans”. As for sending reprogramming from Earth, what could possibly go wrong…?
Now lets look at the proposed propulsion mechanism. Even a cursory analysis with an accelerator around teh Moon’s equator shows how difficult this would be. At 0.1c, the microbot must be switched from a circular track to an exit in about 1/3 of a second. The shorter the track, the faster the switching to send it away from the track towards the stars. I would like to see a lot more on the engineering and costs to make this work. Apart from the free vacuum, it would make the cost of the LHC like a school science project by comparison.
The posited deceleration at the target star is handwaving. The microbots also now have to create a superconducting coil within their mass constraints. Plus the solar cell/sail arrays. In all likelihood, the plan would result in microbots flying through the target system barely slowing down, and any bot that hit a world would burn up instantly, or create a nice crater on impact.
As NS and Alextru have implied, this is an aggressive, biological invasion if the target world is already alive.
If it was done on one of our icy Moons, it could even make the Moon unapproachable for we current humans 1.0.
I certainly agree that, with all the hand waving, and even going as far as imaging ‘sending’ humans this way, this is more of a back story for a Sci fi novel than a serious proposal. But, at some point, many things now reality were in that boat. For the simple and practical reason of avoiding wasteful conflict with, or destruction of, native life I 100% agree that any target needs to be well explored first. But if we ever have the tech to do this then adding a scouting phase will be fairly trivial. If we locate a viable but lifeless target, and have already conducted a survey to determine there is little more we can learn from it…. then the basic, core, idea here, of introducing life, is very acceptable both scientifically and morally. The central idea is very much worth speculating over, but as expressed this proposal is flawed.
I think this is a flawed assumption. It is very hard to explore worlds first to determine they are lifeless, yet very easy to send tiny seeds of life to try to add life to them.
Just think of the precautions gene engineered crops and insects have to go through to prevent escape. Just imagine the difference in effort to examine say several square miles of soil to evaluate its living content in comparison to blowing dandelion seeds into the wind. Also note the possibility that those seeds, whether dandelion or interstellar bot, do not go where intended, but have some randomness in dispersal due to cosmic forces. And let’s not forget that if natural panspermia is possible, that this offers another vector for the life from these seeds to reach living worlds.
If we seed the cosmos using this approach, we might as well abandon any pretense that we would be able to ensure that only sterile worlds will be seeded.
To an extent we are talking at cross purposes, as I’m against seeding life using the method proposed. But I am whole heartedly in favour of seeding life, and to do so in a targeted and successful way we will need interstellar exploration capabilities far greater than needed to merely ‘blow dandelion seeds’ – hence exploring a target world to reasonable degree will be trivial, as it will be routine operation – it is the seeding that will be the ‘event’. I also ssume we’ll have gotten much quicker at it by the time we’re seriously looking at such projects. But. I’m not imagining we’d insist on absolute certainty of lifelessness before proceeding either – my objection would only be if we did not check to some reasonable degree, or at all.
It would seem easier to start on a more conservative level – colonizing Mars with lichens and tardigrades and halophiles, perhaps distributed in some sort of West Ford adaptation (see https://www.wired.com/2013/08/project-west-ford/ ). Some might interpret the presence of Mars to be providential, a small back-up planet for the later warmer days of the Sun, where life might find a last chance to prove its meaning.
But disseminating life throughout the cosmos – especially highly engineered patterns of life – well, I suspect a Buddhist might say, correctly, that if you are disseminating life, you are disseminating suffering. Do we want slaves in Orion, landmines in Ursa Minor, brain implants spreading in all directions from Cygnus? Perhaps we should approach our Hayflick limit with aged grace rather than pursuing immortality without restraint.
The proposal in a way recognizes a limitation of life on Earth – we are really not very highly evolved. We are colonial microorganisms, every cell an identical genome, highlighted with transient chemical annotations to provide some differentiation. It is possible that alien organisms can arrive as a speck of fungus, release spores that make flies and roundworms, whose eggs hatch into crocodiles and super-soldiers. There’s no inherent reason why a chicken egg cannot not come with a small section of the yolk set aside for the zygotes of every creature on Earth, to be mobilized as needed for the greater glory of the hens. We just haven’t evolved it… yet. This proposal seems to want to.
To quote from the above:
“But disseminating life throughout the cosmos – especially highly engineered patterns of life – well, I suspect a Buddhist might say, correctly, that if you are disseminating life, you are disseminating suffering. Do we want slaves in Orion, landmines in Ursa Minor, brain implants spreading in all directions from Cygnus? Perhaps we should approach our Hayflick limit with aged grace rather than pursuing immortality without restraint.”
Percival Lowell, an absurdly wealthy Boston Brahmin of the Nineteenth Century, imagined that the Martians that built his fabulous canals were evolved beings who would eventually go extinct with dignity and remain confined to the Red Planet. H. G. Wells, born into far less prosperous conditions in England in the same century (but who lived long enough to see the end of World War 2), assumed that such advanced Martians would not quietly go down with their ship if there were some younger, healthy, and flush with life planets nearby. The natives of Sol 3 were a bunch of relatively primitive talking primates anyway, and this is a Universe of survival of the fittest, after all. Plus Wells was using The War of the Worlds as a commentary on Europe’s colonial ambitions in Africa and elsewhere.
So who was right? Is there a right or a wrong here? For over four billion years, life of all kinds on Earth has done its level best to survive, which includes spreading into new territories with more room and fresh resources. Are they evil for doing so? If Earth were dying and Lowell or Wells’ inhabited Mars was our one chance at species survival, would we really deign from taking over that planet because we wanted to do what was noble, or would we decide that these beings either had had their day in the sun or they aren’t human anyway (and certainly not a member of any earthly religion, thus not favored by God) and move in?
While I am glad to see that humanity has become more sensitive towards other species than in the past, at least in a collective sense, there is no guarantee that an ETI will possess our sense of morality and ethics, not even at a token level. There are already so many inorganic factors both on Earth and off that would wipe out every living thing on this planet in a moment’s notice not from deliberate cruelty or casual amusement but sheer indifference. Forgive me if I generalize here, but it seems that many of the more intelligent species on this planet have a cruelty streak that their intelligence does not appear to mitigate. I am looking at you, dolphins and orcas.
Humpback whales, on the other hand, have been documented to actually protect different species from sharks and orcas with no direct benefit for themselves. What does this all mean in the context of this thread? Only for the moment that while we may have the best intentions at least on paper, other species may not care about those not like them. Goodness knows we didn’t for the longest time and still have a long way to go in many areas. Just decades ago we were killing whales for food, perfume, etc., and some nations are still doing it, despite knowing how smart they are. All because they are not even humanoid in form but are related mammals just the same.
Of course the real amusement here is that some commenters in this thread are already acting as if we have actually produced a fleet of star seeders and they are sitting on some launch pad awaiting their countdown. We cannot even seem to get our act together about sending humans back to the Moon or onto Mars. Decades of failed promises and pretty graphics and conference slide presentations have proven that, and we are worried about “polluting” the Universe with terrestrial life? Perhaps when I see actual hardware built and then lofted into the galaxy, we can become realistically concerned then.
We may not be that far away. We saw the tardigrade payload added to the Beresheet Moon lander. It is hardly beyond our capability to add a few micrograms of bacterial cells to a Breakthrough Starshot sail. If these are launched sometime within this century, such seeding will be starting, and there will be no possibility of recall.
In the subpar remake of The Day the Earth Stood Still, the aliens came to Earth to punish humanity for its poor stewardship of the planet due to our technological civilization.
As some reviewers pointed out, did the even more technologically advanced and widespread ETI somehow manage to develop such a society without making a mess anywhere?
https://foreignpolicy.com/2019/10/30/nasa-space-exploration-mars-city-musk-humanity-keep-space-pristine/
There needs to be a balance where necessary, but assuming space with its numerous dead worlds and constant bathing in cosmic radiation could not handle a little pollution from us shows a deep lack of understanding about how things really are out there in the galaxy and beyond.
Life and pollution are very different things. The former keeps growing until its resource base is fully utilized. The latter is finite and remains static until degraded. In the first version, the exocivilizations were concerned that humans would spread destruction with their nukes. The remake was so awful that I cannot even recall why they came. ;)
Seeding Mars seems much easier than arranging human exploration – indeed, the existing missions go to extreme lengths to see that we _do not_ seed Mars. Also, the West Ford project, incredibly, distributed half a billion copper wires into orbit in 1963, some six years after Sputnik. I would imagine that tiny wires anchored to preserved specks of tardigrade and lichen (“ballooning”, in arachnid terminology) could be arranged to deliver their cargo safely to millions of sites on Mars with nothing out of the ordinary for current technology – except for the intent to pollute the planet with Earth life, that is.
I don’t see any reason why we couldn’t pursue synthetic biology to a maturity level where a planet can be terraformed by sending something the size of a seed or nut. Well before synthetic biology reaches that maturity level, it will have transformed what it means to be human, an Earthling and a self-aware intelligent being. The demand profile for biospheres will be too complex for the spray and pray method of terraforming. Terraforming won’t even be necessary. Further, a civilization where synthetic biology has fully matured will put great value on any unique instance of evolution whether it is the result of exogenesis or abiogenesis.
Earth life is valuable, perhaps even priceless or sacred. Preserving Earth life deserves and requires a more conscious strategy than masturbating into the void.
Or as the Weyland-Yutani Corp. would say: “shake and bake”.
If you have several billion years to spare, a small colony of unicellular organisms could create a rich biosphere, much like our own in diversity. But Buckalew wants to force this development with specially engineered organisms to rapidly create ecosystems with interacting species and eventually some sort of post-humans. As you say, this would be an immensely complex project, run on a different world, needing all sorts of tweaked organisms. I would think that the results would almost by definition be indeterminate. Chaotic in the mathematical meaning of the word.
I would describe fully matured synthetic biology or genotech as collapsing the distinction Buckalew draws between genes and robotic nanotech. Biology is nano-robotics. Lay eggs on an asteroid or comet. The eggs hatch and grow into something akin to a winged bug that dives into the sun and uses it wings as solar sails. During interstellar flight the bug could use its wings as raw materials and grow a magnetic coil that it uses to decelerate when it reaches its destination. The bug’s could be fertilized by downloading radio gametes from Earth. The bug gets smaller as synthetic biology matures. I don’t think it is an issue of how fast we can boot strap an ecosystem on another planet or whether synthetic biology will reach the maturity level I’m describing. I would be shocked if this maturity level is more than 1000 years away.
I think the issue is how do we wield synthetic biology and talk about what we are. Synthetic biology will allow for the existence of Pandora’s self aware forest here on Earth. When faced with what is possible do we fetishize the human phenotype at the expense of a galaxy wide genotype? Is it remotely possible for humans to remain the dominant lifeform, the one calling the shots?
Perhaps the return on investment profile for human expansion is more complex than what Buckalew offers. If we use Earth as an example, expansion of a species results in speciation. If preserving Homo sapien civilization or an expanded definition of humanity is the goal, then expansion will likely offer diminishing returns and possible negative returns.
You might be right. A counter-argument is that if this is possible, and ETI exists, then why don’t we see these genotech robots? They are, after all, just another version of von Neumann replicators.
What we think at this point is that the fanciful nanotech as described by Eric Drexler has not been demonstrated at all, and there are a number of reasons to suspect that they are not possible as described. As life is proof of principle that nanomachines can exist in some form, the issue becomes how far can life be modified until it no longer becomes functional. IDK the answer to that, but I think that forced evolution experiments on synthetic biology might start to give us some answers. What I don’t doubt is that anything that is living will evolve on its own, and that the outcome of that evolution cannot be predicted.
Synthetic biology would allow von Neumann probes to be extremely diverse in form and cognitive ability. They could be anywhere. I don’t know how far synthetic biology can push the boundaries of life but at least as far as any life form that exists in the Universe.
Saturn’s moon Methone looks just like a large, smooth egg. That’s all I am going to say here….
https://en.wikipedia.org/wiki/Methone_(moon)
Among metazoa, the accoutrement of zygotes is so often quite complex; divesting them of that accoutrement as in metatheria and eutheria entails the phylogenetic acquisition of appurtenances such as marsupia and uteri. Even the “eggs” of vertebrates are more than just zygotes.
Fungi can indeed start from a single simple spore, but not so for plants beyond vascular cryptograms. Bacteria do form polymicrobial films, and have both multicellular and plasmodial slime molds. Anything more will need more sophistication than described.
And let us not forget that the molecular biochemistry of life on earth is organized for evolution, to elbow out the “less fit”. If some other place is seeded with life, evolution ain’t gonna come to a screechin’ halt. Even with our genus – Homo – which has been around for about 3 million years, other Homo species – naledi, robustus, neanderthalis, heidelbergensis, denisovanis, and maybe others – have come and “gone”, although we carry some of their genes, and are direct descendants of some through genetic drift, albeit with natural selection. Homo sapiens has been around for ~300,000 years and there is no telling what our descendants (if any!) will be like in another 300,000 years.
The critical importance of social interactions between newborn and infant humans and their parental figures is highlighted by the dysfunction in neglected children. How that social interaction will be substituted sans parent figures remains to be seen.
It would be hard enough to create a human seed ship with needed wombs for “tank-grown” humans, followed by AGI robots to educate and socialize these babies. The thought that this has to be done for potentially millions of metazoa is more than fanciful.
Absolutely. Once we seed the galaxy, there is no going back with the consequences. Even the suggestion that we can “reprogram” all the life we create is absurd. Then there is the time factor – at the other end of the galaxy, engineered life will easily be able to evolve new species well before any signal could even reach them to call for changes.
Thinking about discussed idea and multiple comments here, I suppose we can get fine explanation to “Fermi paradox”:
May be multiple advanced ETI civilizations widely spread around our Galaxy , after studying Homo Sapience simply put Huge Space Condom around Solar System, to protect the Universe from undesired pregnancy that can be caused by sexually disturbed teenager – Homo Sapiens civilization…
In contrast to Douglas Adam’s encyclopedia entry for Earth: “Mostly harmless”.
I always thought the Fermi Paradox was a case of lazy thinking or just an off the cuff comment by Fermi. Maybe the intelligent aliens don’t need or want space ships? Maybe we would find it very difficult to identify them as being intelligent (how about a vocally silent, deep thinking, long lived species spending its time solving mathematical problems in their head with no need for our type of vaunted technology). Or maybe several different types of ET’s are on there way at this very instant but the voyage is thousands of years long (or even longer). Or maybe they’ve noticed us and decided to make sure we don’t find them since we’re so fond of wars and stealing other peoples’ land and resources. I think all these arguments have been proposed before but the idea that a bunch of ET’s are going to show up on our doorstep (other than at Hallowe’en) is not very likely, and not necessarily because they aren’t out there at who knows what level of abundance.
If there is a connection between synthetic biology and the Fermi paradox, perhaps it supports the Prime Directive explanation. An intelligent biological species that discovers and utilizes synthetic biology would be analogous to the larval stage of intelligent Earthlings. If ET people put value on uniqueness, then contact during the larval stage could negatively impact Earth’s final unique metamorphic form.
Correction : I am reasonably sure Robert Buckalew is talking about exoplanets WITHOUT any homegrown lifeforms …..so why all the guiltfeelings ? ….in the near future it should be possible to distinguish between exoplanets with-or-without life …so whats the big ´´etics´´ problem ?
Nature’s method of spreading life doesn’t involve screening new habitats for existing life. The methods offered here and by many others can certainly be applied to specific targets but I think the crux of Robert Bucklew’s argument is that we are so important that we can spread indiscriminately.
The argument for even doing this is his opening one that exogenesis was the source of life on Earth. That means that other planets are also living. Arguably all that can accept our type of life are living by similar means. Sterile worlds would be rare by this argument.
But let us suppose that the exogenesis argument for life on Earth is false, and that we are the first to try to seed the galaxy. There is almost no way that we can ensure that the target worlds are sterile. Either we have to do this from Earth using technology that is remote from every target, or the microbots have to do this on their way into a target system. They are basically described as smart seeder ships, so they have no capability to do so. Just like dandelion seeds do not assess the ground they alight upon, these seeders will just hit target worlds and start functioning if surface water is present.
Assuming ‘false’ [we seed the galaxy first] doesn’t seem to matter in that if earth is being bombarded from space for a billion years and flinging life off-planet as a natural consequence, some of which survives enough to start earth life elsewhere, we can’t assume that this process isn’t going to repeat… i.e. earth assuredly isn’t the only planet being hit by other stuff in space. Meaning that we seed the galaxy whether intentional or not.
I reckon the strike that created the Younger Dryas event alone lofted a couple of million tons of suitable material, some of which presumably escaped into the void.
The only real question becomes one of speed — intent isn’t really meaningful, unless one can imagine that plant life from millions of years back was plotting escape from earth and called for [and caused] comet strikes.
If extraterrestrial life is constantly bombarding Earth, there is no indication that it has had any impact. We see no evidence of “shadow biosphere” organisms with different DNA, genetic code, or other indications that they don’t come from a LUCA. Maybe they arrive but are immediately consumed by terrestrial life. Hoyle once suggested that epidemics came via comets. With modern molecular biology we are confident that this cannot be the case. [Science paring away the false hypotheses.]
If correct, this undermines the argument that we should do this because it is happening to us anyway. We can do it for other reasons, but not this one.
I hadn’t intended to imply that the earth itself was being bombarded by interstellar ET life so much as bombarded by asteroids and comets etc and flinging life outbound. As we have bits of mars we have recovered from earth from asteroid hits, presumably there are bits of earth on mars. An article I read recently discussed the notion that if mars life were similar to earth life then how would we know if this proves separate creation or something more akin to ‘contamination.’
Moreover, if life here were created by inbound materials then it would be more likely that we would see similar life elsewhere assuming ‘we aren’t that unique.’
Hence the thrust of the comment was that we know there is life here, perhaps we are spreading it already.
As such, perhaps we are alone; maybe we are the first, the progenitor of life in this galaxy via purely natural forces [asteroid / comet strikes.] Someone / somewhere has to be first, why not earth?
Either way, if earth is already flinging life into space from natural causes then this should be part of the discussion. Assuming there is no life leaving earth just because only humans have rockets doesn’t seem realistic; humans aren’t and haven’t been the sole mechanism.
You raise an important point with the first paragraph. If life on Earth is the product of exogenesis, then indiscriminate exogenesis extending from Earth could be disastrous for a civilization that depends on innovation to avoid Malthusian collapse.
How the heck are the ETIs that launch these microbot arrays even going to KNOW FOR CERTAIN that there is absolutely no life(on the surface, perhaps, but UNDERGROUND? Cmon)on a planet CAPABLE of supporting and sustaining THEIR kind of life?
Another Correction : The universe is not a courtroom where humans are standig trial for the great SIN of wanting to survive…. we will do what we have to in order to survive , just like any other lifeform …and in the long run survival demands the migration of hmanity to other starsystems … No serious problem have ever been solved without a certain risk of unwanted biproducts resolting from the solution , all we can do is to try and minimize the damage resulting from our solutions as best we can ….this is a general truth with implications in all areas of human society , including in the area of Interstellar Migraton …..we will do our best to seed ONLY planets without any homegrown lifeforms , but we will not be paralyzed by the fear of wiping out an apparently dormant lifeform which has procused no chemical changes in its environment…..the only question remaining open is WHO will be seeding the sorrounding exoplanets with eartlife , it probably wont be anybody belonging to a western civilsation …
If we seed the galaxy with terrestrial life, it shouldn’t be by random seeding with engineered biology. It should be done by means to ensure that the target worlds are effectively sterile and with terrestrial organisms added to build up terrestrial ecosystems into a diverse biosphere that humans could inhabit. That will take millennia per world at a minimum, and probably a lot longer. The larget problem is that the limitations of STL travel means that when such seed vessels reach the farthest suitable worlds, terrestrial life itself will have evolved and may no longer be suitable to inhabit those terraformed worlds. There is no way for a world 50k ly away to not evolve on a different trajectory than life on Earth over 50k years. Reuniting terrestrial life with those worlds would be similar to reuniting our world with life in the late Pleistocene.
Always best to an optimist …there might be a way to accelerate the seemingly endless process of terraforming…..it is not impossible here and now to experiment with accelerated terraforming of a given lifeless environment …..the good news is that singlecelled lifeforms can breed incredibly fast in the right conditions , if we look for a theoritcal upper limit to the speed of terraforming , it should be the time it would take for an effektive but realistic photosyntesis process (on earth perhaps 0.6 % of solar energy reaching the planet ) to produce the neccesary amount of oxygen , and this must include oxygenation of much of the upper crust of the planet…..thats a lot of oxygen , but if we START with the right chemical conditions , there is enough energy in photosyntesis to do it in a few hundred years
Death is an individual event. Whether or not our species survives, we all die, and nothing can change that. Family history and my individual circumstances suggests that is not so far in the future for me. I am quite comfortable with that, more so with poetry than physics. It is well . . .
Do you know cryonics?
Good luck on your journey. It is never clear if the journey describes a distinction between parents yielding to their children and children eating their parents. Hopefully, humanity is willing to be a parent.
Thank you for this intriguing and thought provoking article Robert. I have to say I’m on the side of those who don’t think it is appropriate to suggest we should seed other planets with Earthly life. I would also disagree with your first sentence. I don’t think we know anything near enough about the prevalence of life in general and what we could identify as intelligent life in particular, to make any statements about how common intelligent life is in an entire galaxy. Unless we can start to assign actual values to the variables of the Drake equation (as one method to make an actual estimate of this kind) based on acquired data we have no basis to make any statement about intelligent life’s prevalence. We should investigate as much as possible and I’m not against the idea of probes being sent to other systems but not to deliberately seed planets (or possibly exomoons) with life.
A very good article Robert
There were sun ideas in there I had never thought about before or considered.
Interesting reading
Thanks Laintal
Are planets the best place for advanced life? Especially if that life wants to expand for a variety of reasons? I would think having the ability to remain mobile in space while also being able to land on comets, planetoids, and planets to obtain resources would be more advantageous.
Sitting around in one spot for a long time can make one a sitting duck, either for conscious enemies or errant space rocks or solar flares or things we are not even aware of yet. The other enemies to worry about are complacency and stagnation.
Basically Cabal’s final speech in Things to Come.
“All the universe or nothingness? Which shall it be, Passworthy? Which shall it be? …”
Exactly. Here is that actual scene:
https://www.youtube.com/watch?v=KRRXtymX50U
A speech that needs to be repeated constantly everywhere.
It is also Toynbee’s thesis on civilizations. Either respond positively to challenges or die. Clarke was a “fan” of this concept, and it shows in some of his short stories, and even arguably in his novel, “The Songs of Distant Earth”.
Here is an essay on Toynbee to contribute to the conversation:
https://www.cambridge.org/core/journals/comparative-studies-in-society-and-history/article/return-of-civilizationand-of-arnold-toynbee/FE6F858900CBB1843DD7C0D3DD5BE360/core-reader#
Many people are overwhelmed by our technology and the methods employed to deal with, good and otherwise, the rising human population, which at this moment is at 7.742 billion and rising every second:
https://www.worldometers.info/world-population/
Many think it would be great to go back to a simpler lifestyle, say, how things were in 1800. That is until they find themselves without electricity and therefore all their gadgets and comforts. And just wait until they discover the state of medicine without modern technology and knowledge.
There has to be a balance. We are finally starting to wake up to the detriments of our civilization. Now if we can fix those without throwing out the whole system, which will lead to disaster and deaths in the billions, we might be able to achieve that term people like to throw around, sustainability.
Plus we do have an entire vast Universe beyond the cradle of our birth. No, we don’t know if there is a duplicate of Earth out there somewhere, but that doesn’t mean we cannot create something else, perhaps something even better. We can also design our species to better exist in various environments and thus ensure our survival. We just have to start really thinking outside the box.
Hi Paul
Thought-provoking essay, but dubious justification. Yet there’s something smells like “racial purity” about the arguments over different life forms encountering each other. We hand-wring over the ecological disruption we’ve caused by introducing other lifeforms, yet when such faunal interchanges have been caused by geological processes, we document it without comment.
There is nothing we can do about past geological events. That the North and South continents of the Americas joined with a landbridge which resulted in the extinction of the marsupials in South America was no something we can change. It did represent a diversity loss. Introducing animals and plants into new ecosystems can cause immense damage due to unforeseen consequences. Rabbits and Cane toads are just 2 examples. When geological events separate populations, then new speciation and diversity can occur. Islands are a good example, as is the drowning of the land bridge between Australia and the Asian continent. There is the famous Wallace Line in the Pacific.
Should humanity colonize space, one of the most interesting long term effects might be the establishment of entirely new ecosystems with new species (both natural and engineered) that would be isolated from other colonies. This would allow life to experiment with new forms and increase the overall diversity of life. If done in vast O’Neill’s, this would represent a true flowering of life’s possibilities. It might even allow the recreation of simulated paleoenvironments, like “Jurassic Parks” but without the danger of interaction with modern life.
But for five prior major (and many minor) episodes of intensive, extensive biodiversity loss – “mass extinctions” – we (meaning Homo sapiens, and our contemporaneous biota) would not be around. So hooray for past extinctions!
Dinosaurs existed for 160 million years. Do you think by now they might have developed space travel among other things?
https://memory-alpha.fandom.com/wiki/Distant_Origin_(episode)
Unlikely, but not impossible. They would have had to develop more dextrous appendages as they evolved to be able to manipulate objects. Their “descendants”, the birds, did not.
Essential primate characteristics include those related to arboreal existence in forests with continuous canopies. Visual field overlap with stereoscopic vision and three-axis range of shoulder movement as a result of brachiation were two important features. Prehensile hands and opposable thumbs were thus acquired. All of these were important to reaching for and grasping, modifying, manipulating and throwing objects, with increasing dedication of the upper extremities to these activities contributing to a bipedal gait. Manipulating objects led to the control of fire, which in turn led to the shrinkage of teeth, which combined with other alterations to the upper airways associated with the upright stance made speech possible.
Continuous forest canopies were probably not present in the time of the dinosaurs.
Evolution is highly contingent. Without a myriad of chance events, both big and small, we would not have arrived, and even then, something triggered our “cultural explosion” that really got things started for us.
With millions/trillions of habits just in the solar system, the possibilities of increasing diversity are apparent. They would act as islands, allowing different divergent evolutionary paths to be taken. Human intervention could even artificially increase that diversity, including genetic engineering of radically new life, isolated from other habitat ecosystems. Unlike colonizing worlds in the galaxy, all these environments would be no more than a few light days from each other, and most withing light seconds and minutes.
What we need to do. We can let some evolution proceed at random and manipulate others.
There’s no immorality in influencing evolution — which we’ve done with all domestic animals and plants — not least because it’ can be far less blindly cruel than sheer chance.
This is basically the back story for a Sci fi novel. Fair enough, lots of great ideas started that way. The proposal as presented is massively flawed but the core idea – seeding earth life to other worlds – does not strike me as objectionable, and some of the ‘this is bio pollution’ arguments put forwards strike me as excessive. Indeed, it would be rather noble – with important caveats: First, the target worlds must be screened to be (as far as is practicable to check) clear of native life. That will mean extensive exploration, but if we’re doing this at all then we must be mature enough to make that investment of time. Second, the ‘sending’ of humans this way, even if do-able, should be refrained from unless it’s that or our race goes extinct – functioning and healthy human beings need certain things in their upbringing that I doubt could be replicated by machines.
There are very strict laboratory protocols to prevent any gene engineered microbes from escaping into the wild. There are good reasons for this. Perhaps those protocols will be loosened in the future, or obviated by laziness, but they are there for good precautionary principle reasons. We surely don’t want to experiment on the galaxy.
If it turns out to be mostly or wholly empty of other life, and we’ve gotten what scientific knowledge we can from it (that might be obscured by introducing life), then what objection is there to experimenting with putting life on other planets in the galaxy?
As I have tried to convey in other comments, the problem is doing the prior analysis before seeding. Buckalew’s approach is just to go ahead and seed, using minimalistic microbots that are effectively scattered to the wind. While we can do some target analysis remotely, the many suitable HZ targets will remain ambiguous with regards to life unless we can send far more substantial probes in advance of the seeders. But those advance probes are hugely more massive and would require far more energy to launch. While they could also carry the seeds, this is not what Buckalew envisions. Therefore I believe that the seeds will just end up on both sterile and living worlds. That should be unacceptable. If the targets can be proved sterile before seeding, then I have no objection to bringing life to those worlds.
Oh I’m not defending the proposal as stands, just the concept of seeding. My only caveat would be that there will always be a sane limit to how totally we can rule out the possibility of native life. At some point you just have to accept that there’s always some risk of a mistake, and you’ve done all that you reasonably can to minimise it.
I should probably have started with “seeding as an overall concept should not be made to stand or fall with this proposal, with its randomised approach”
For a civilization able to wield matured genotech, discovering a planet with even a simple unicellular biosphere would be the equivalent of extent human civilization discovering alien technology. While expensive, thoroughly searching a planet is also valuable. Within the context of survival economics, perhaps more valuable than terraforming a planet for a ‘human’ population.
Language is arguably humanity’s most powerful tool of survival. It allows individual human thought to exist as civilization. Civilization flourishes by evolving the complexity of its collection of human thoughts. Idealized, civilization would experience a loss in complexity as a wound and approach selective pressure with a light touch.
Genotech can have an analogous effect on the individual human genotype but we would have to include all life on Earth in the analogy. Mature genotech allows the concept of a selfish genome to exist on a planetary and galactic scale. I don’t see how homo sapiens could apply genotech without creating this galactic organism. Space travel is such a profitable place to apply genotech and humanity may have to get matured genotech into space to prevent it from terraforming the human species. This new galactic organism wouldn’t have to be a threat to the existing or future complexity of galactic life.
The nature of this galactic organism would demand it nurture unique biospheres. It increases its potential to survive by copying unique traits into its genome. It would experience the excessive fetishism of the phenotype as cancer.
It would appear to me that the likelihood we’re going to find Earth 2.0 is vanishingly small. Our galaxy has anywhere from 200-400 billion stars, with around half of them at least as old as our sun; yet there’s no signs of intelligence in the galaxy. Not only that, but we have yet to detect signs of intelligence anywhere in the neighbouring galaxies.
Out of trillions upon trillions of stars – nothing. No signs that the earth has been visited, and no signs of a dyson swarm. Either the jump from non-intelligence to a technological civilization is nearly impossible, or at some point life just can’t seem to get started. Perhaps photosynthesis never evolves, or perhaps the leap from single celled to multi-celled organisms is hard, or perhaps planetary surfaces are periodicially sterilized, or perhaps ….. We don’t know yet, but should we find the odds of there being anything other than bacteria within the Milky way to be near zero, then perhaps we should spread the seeds of life.
Too me the idea of a sterile universe within no one to stare at the stars with a sense of wonder, or to fall in love, would be nearly unbearable. So if we find that photosynthesis is the bottleneck, then seed the galaxy with something to create an oxygen atmosphere. If multi-celled life is the bottleneck, then seed it with primitive multi-celled life and then let evolution take over to adapt it to whatever environment it finds itself in. Of course none of this helps us, but in a few hundred-million years perhaps the void won’t be so much of a void.
As for this self-hate, …. Would many species out there, even if the galaxy is filled with a thousand or more intelligences, be more capable of empathy than us humans who made the leap from intelligence to technology by cooperating with other species? Cats became our allies to keep the population of rodents under control, reducing the spread of disease. This allowed us to build cities and store grain, without which civilization would be impossible. Domestication of dogs gave us the noses of wolves along with fangs and claws, all without having to evolve them or to spend any of our own brain mass with it corresponding use of energy to do so. That made it a lot easier to prevent wolves from sneaking into a campsite to snatch a child for a delicious, and easy gotten, late night snack. It also made it a lot easier to track game. Then there’s horses with the benefit they brought to civilization via speed and the loads they could carry. Then cows with the ability to turn inedible grass into delicious milk and cheese, and meat. Empathy is built into humanity. Another species, having taken another route to intelligence and technology might very well be little more than sociopaths. That we can have over 7 billion people on this planet and not have it go BOOM is proof of this.
Humanity has made mistakes, mainly due to the fact that our pitiful brains has more than a hundred distinct types of cognitive biases built into them, but I can’t think of any species that would have done better? Rabbits maybe? That’s laughable.
“our pitiful brains”?
The ‘stop the self hate’ argument is a red herring. You have offered descriptions for empathy that are actually descriptions of domination. What you and others are offering as self love is the process of converting life in general into humanity. The list of animals that we have driven to extinction is far longer than the list of animals we have domesticated. This concept of self love is only a step removed from the self love of the Borg. The people you are accusing of self hate do love humanity. They understand that contaminating our planet with lead and mercury made some people rich but caused long term harm. They understand that wiping out most signs of a civilization or enslaving them provided a short term boost to progress but left humanity permanently scarred. They understand learning from mistakes and that gluttony is a shit way to practice self love.
That being said, I would consider leaving the galaxy sterile as an abject failure, even sacrilegious. I think the evidence you site that it is sterile severely lacking and based on an exaggerated assumption of our abilities.
General negativity about oneself and/or one’s culture doesn’t do any good. It discourages you and everyone around you, causing more strife. Characterizing everything you or your country or your species negatively and never missing any occasion to express that isn’t being objective and it isn’t even any kind of personal insight useful for improving oneself.
This is an unfortunate development composed of 20th century elements such as the kind of psychology that prescribes self debasing without any positive alternative and the increasing technology of warfare during 1914-1945.
Time to outgrow it and the habits it engendered, which can’t even be characterized as humility or lack of hubris.
If our various cultures learned from the past how to be more cooperative and less xenophobic, your argument would have some merit. Unfortunately what we are currently seeing is the reverse. The US now has 2.5 branches of government that are xenophobic, racist, and misogynistic. There are US states still trying to whitewash history. There is an active attempt to try to turn the US into a theocracy (shades of Heinlein’s “The Crazy Years”). Europe is doing little better, with some countries following a similar path. Britain, or more correctly England, the country of my birth, has become noticeably more racist and xenophobic. Other cultures are, notably China, continue towards more autocracy. A war between China and the US is clearly on the horizon unless something changes. Globally, we are still on a course to mass extinctions, and severe damage to our human populations, with immeasurable economic losses. Somehow all the history of other cultures collapsing due to more local changing conditions does not seem to have any salutary effect on our response, other than to show how humans respond similarly to change.
If our hopes of a bright, hi-tech future, with space travel as a commonplace and [post]human expansion to the stars, is to happen, then major wars and possibly global collapse, will delay that dream, possibly for millennia.
If there was some way to offer an equivalent to Ray Bradbury’s “The Toynbee Convector” to help steer us to a better future, I would take it, even if it meant short term losses and is a dubious “the ends justify the means” approach.
If you have a solution that is not just a Pollyanna view of the world, let’s hear it.
We need to stop using some terminology. “Xenophobic”, “racist”, and “misogynistic” are totalitarian words intended to smear people defending their own cultures and lifeways — or, specifically, Western people doing so.
I seldom if ever hear them applied to Islamic or Chinese aggression, for example.
Absorbing most cultures into a vast general mass controlled by a central authority (“inclusiveness”) is actually more dangerous to human survival than separate cultural and political entities. It means rigidity, oppression, the creation of a ruling class whose main function becomes preventing innovation and keeping the “peasants” under control.
A vital factor in Western culture was division into different states and the separation of political and religious authority — yes, the latter existed despite claims to the contrary.
Totalitarian states, greatly admired by so many power grubbers, were never any more peaceful and prosperous than smaller, open entities.
Self-hatred leads to vulnerability to external control — by which I mean government as well as foreign — repression of ideas, extreme submissiveness and seemingly inexplicable violence. Not to mention ludicrous cultivated guilt over things over which one could never have exercised any control.
Small political entities with distinctive cultures best serve the causes of survival and life improvement through individual confidence.
I will just say that we are going to have to disagree on this. While future politics and religion will impact any future decisions on technology and seeding the universe, perhaps we should steer clear of this now, especially as globally, humanity appears to be polarising.
@DCM Alex Tolley included non western cultures in his critcism, and specified China – that you missed this marks your response as knee jerk, not thought through. We definitely need those words if we’re ever to be in a position to undertake anything like an interstellar seeding project – little is more helpful to selfish and divisive forces than refusing to name them, or discouraging others from doing so. And, as someone London born who has examined a slew of sociological and psychological about English culture, may I say that both the weight of independent evidence and my own experience support Mr Tolleys summing up of current English culture. I am happy to supply refences.
I appreciate that your are sincere, and well meant. But it seems to me that you are defending the right of some to act as though they are ‘just plain better’. It is self evident that no race, species, or type of life is. Going out into the galaxy, of which we still know so little, with such an attitude may prove to be an extinction level mistake. If we could make it out there at all carrying such pointless baggage.
“Just plain better” is the opposite of what I support. It’s the belief of people wanting a centralized overstate.
I don’t know anything about possible alien species or what they do.
@DCM a person in a privileged position who supports equality is not self hatred man. Read your own post back: You seem to be trying to redefine key words and phrases in the discussion – for exampe ‘inclusiveness’ or ‘defending your culture’ so that they cannot be used in support of any form of equality. This is very, very ill advised – it is the point at which discourse breaks down. Perhaps you think yourself a metaphorical wolf who need not care about that – but if so I suggest you read up on the lives and habits of wolves.
There are big differences, sometimes accidental but usually intentional, between presented definitions and those privately acted on. Especially in power seeking groups; the real purpose of the latter is at least to keep if not extend power.
I have read a good deal about wolves and dogs. I don’t understand why you think I’m a “metaphorical wolf” or identify with such.
Respectfully DCM, there’s such a thing as dictionary if there’s any question as to how we should be using these words. Perhaps I misjudge you, genuinely, but you are coming across as attacking the language of the debate itself, even as it’s pointed out to you: Now you are trying to assert that belief in personal or group superiority is directly connected to people wanting a centralised overstate state – that’s, at a very generous best, a gross, gross oversimplification. Quite likely its just untrue except for certain individuals – and if you cherry pick examples you can find evidence of almost anything being true : That’s absolutely classic conspiracy theorist self deception. But we are way, way off topic now – so I resign from the argument, and will read your response with great interest.
Constantly inserting self-debasing commentary into discussions here (and elsewhere) is my actual complaint. There’s no need for it; overall it tends to turn people against the subjects — subjects to which it has no real connection. It isn’t objective or even modest. That and its motivating attitude is all I object to; it can be seen as superfluous wordiness.
I do think huge centralized states are a danger to long term human survival and brought this up because negativity and promises of security are used as propaganda for such.
“The US now has 2.5 branches of government that are xenophobic, racist, and misogynistic. ”
Really? Any proof?
I can provide evidence, but I will not. This is OT and will just detail the theme of the post.
I think you are treading too close to the Earthman equivalent of European superiority that supported colonialism. Far more reasonable to assume a Copernican concept that we are in the middle range of empathy with other species. All intelligent species should ideally respect others. Some will not, but I do not think we would accept that species on a higher empathy scale should dictate to us our way of life, or attempt to replace us or become the dominant species. Inform, yes, but not enforce.
Unless some technology emerges that allows rapid interstellar flight, the likely separation of intelligent species should keep us all reasonably separated, and certainly fairly safe from invasion and attempts at colonization. By spreading humanity and life around the solar system, we should be reasonably safe from destruction from a sociopathic species. [However, I could imagine that carefully crafted communication could result in humanity’s self-destructing.]
Any human culture acts superior when it gets enough power.
Indeed, only European and European derived cultures have tried to eliminate such institutions as slavery, developed science as an ongoing self-correcting enterprise, deliberately tried to preserve conquered cultures (earlier empires didn’t always have the power to destroy them), etc.
Must this cultivated negativity slither into every topic? It’s not objective although many believe it is.
Genotech will be the first technology capable of destroying all humans. Burnt fossil fools and nuclear weapons tremble in its presence. Eventually, we will be faced with a technology that will allow one person to destroy humanity. A bucket of genotech poured into the ocean could do the work of a giant asteroid. Genotech is likely the best example of a how humans could destroy themselves and therefore a tremendous argument for humans to become space faring. It would increase homo sapiens chances if advanced genotech experimentation was done on isolated worlds.
The threat posed by genotech reveals just how difficult it is to navigate survival economics. Civilization is more than a collection of homo sapien bodies and minds. The population a closed loop colony will have to embrace calculating the value and cost of another person. Increasing population doesn’t always increase the survivability of a species or a civilization. It is insulting to claim that people who question the value of adding another person hate humanity or civilization.
Civilization is the gestalt state of a complexly cognitive people. A planet with any biosphere is equivalent to Harvard University of the Sistine Chapel or advanced alien technology. It is rational to vigorously debate the value of keeping them intact.
Peter Watts Rifter series of novels includes the problem of advanced genetech that could destroy humanity. It is certainly possible. A few years ago we had scare stories of biotech diseases being used to target specific ethnic groups.
All the more reason to construct off-planet habitats.
Agreed.