Last week we looked at DE-STAR (Directed Energy Solar Targeting of Asteroids and Exploration), an ambitious program for developing modular phased arrays of kilowatt class lasers. The work of Philip Lubin (UC-Santa Barbara), DE-STAR is envisioned as a way to scale up a space-based system for asteroid mitigation. And in a new NIAC grant, Lubin will study an off-shoot called Directed Energy Propulsion for Interstellar Exploration (DEEP-IN) as a way of driving tiny ‘wafer’ probes on interstellar journeys. Reading about these ideas, Jim Benford responded with the comments below. A plasma physicist and president of Microwave Sciences (Lafayette, CA), Dr. Benford’s work on microwave beaming to sailcraft has included laboratory experiments at JPL with brother Greg that I’ve written about in these pages. Here are his thoughts on DE-STAR’s beaming methods and the issues they invoke.
by James Benford

The calculations presented by the DE-STAR group are basically a revisit of the work of Bob Forward, which was published over 30 years ago. Several other workers have formulated beam-driven sail scaling in the past, so this new group is revisiting that work.

From inspection of their papers, it appears that the DE-STAR group is producing concepts for very low mass, fast sailship probes using a method several others have explored previously: They get very small, light probes by putting all the effort into making them small, at the expense of having an enormous beaming aperture. The very large aperture is not emphasized in their papers, but the smallness of the sail is.
The “realistic” DE-STAR 4 design, for example, has an aperture of 10 km on a side. So the aperture is 330 times larger in linear dimension than the sail, 100,000 times larger in area.
Looking at it from the point of view of cost, such designs are far more expensive than alternatives where the aperture and sail are not so very different in size. (Beamer system cost scales inversely with the sail area.) So the choice of very large aperture drives the capital cost of the system very high; I estimate between 10 and 100 trillion dollars, depending on economies of scale. The operating cost is low because the required power is lower. I would recommend that the DE-STAR group look at cost-optimized methods, which are much more realistic and therefore much more likely to be built.
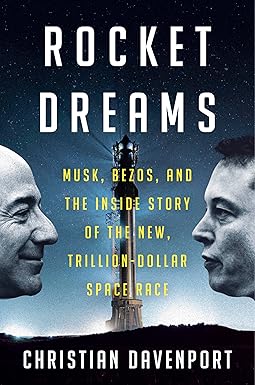
Image: Testing carbon sails at JPL. Here a carbon disk sail lifts off of a truncated rectangular waveguide under 10 kW microwave power (four frames, 30 ms interval, first at top). Credit: James and Gregory Benford.
Another problem with small sails is that if you do try to launch all of them simultaneously as a constellation, on a beam much larger than a single sail, the sails will not ride on the beam. They will drift off to the side due to perturbations. There are an extensive series of papers on the program I managed in sail acceleration, spin and stability from 1999 to 2005 (two of these are listed below). They describe beam-riding analytically, computationally and experimentally.

Image: Carbon-carbon sail used in sail stability and spin experiments. SAIL diameter is 5 cm, height 2 cm, mass 0.056 gm. Experiments and simulations show that such conical sails can ride a microwave beam very stably. Credit: James Benford.
So it’s a pretty solid understanding, based on internal reflections on the underside of the sail, as follows:
- The sail must be non-flat, with a conical cone the best shape with the apex pointing away from the beam;
- The diameter of the sail must be of the same order as the transverse dimensions of the beam; and
- Spin helps stabilize beam-riding craft.
This cannot be avoided or all is lost — the sail tumbles. For more, see:
“Stability and Control of Microwave Propelled Sails in 1-D”, Chaouki T. Abdalla, Edl Schamiloglu, James Benford and Gregory Benford, Proc. Space Technology and Applications International Forum (STAIF-2001), Space Exploration Technology Conf, AIP Conf. Proc. 552, ISBN 1-56396-980-7STAIF, pg. 552, (2001).
“Experimental Tests Of Beam-Riding Sail Dynamics”, Gregory Benford, Olga Goronostavea and James Benford, Beamed Energy Propulsion, AIP Conf. Proc. 664, pg. 325, A. Pakhomov, ed., 2003.


I cannot imagine that Lubin et al don’t know this. Was the idea of pushing small light sails (and asteroid vaporization and deflection) just a topical camouflage for a military space based laser system? IIRC, the use of lasers to beam power from solar power satellites was considered worrisome become of accidental beam drift and, of course, retargeting. The DE-STAR series ends up with extremely powerful lasers that could be a very powerful military asset assuming it can be adequately protected (a fleet of X-37B derivatives?).
Given Dr. Benford’s comments, I am just a little less sanguine about the real purpose of DE-STAR.
Jim Benford’s presentation at the first 100YSS was a real eye-opener for me. I still suggest the use of a swarm of drones, though, which actively steer themselves within a beam rather than relying upon passive control. They can then be used to accelerate AND decelerate a larger starship – deceleration is done by using the drones as impactors which hit a puff of inert propellant gas.
I was also impressed by Benford’s case for microwave beam use rather than (optical) lasers, but I have returned to my old ideas about using an X-ray free electron laser focused by zone plate. Unlike microwave beam or optical laser, it’s possible to make an X-ray free electron laser system with a useful range of 4.3 light years with a reasonably small aperture (a zone plate only about 1km in diameter).
Even though the energy efficiency of an X-ray free electron laser focused by a zone plate is an order of magnitude poorer than a microwave beam, it needs orders of magnitude less beam power. An acceleration of only 1/30gee would get a drone swarm to Alpha Centauri in around 16 years (reaching .5c).The laser would provide the drones continuous power for the entire journey, letting them perform useful scientific observations the entire time. The drones themselves would be much easier to design, needing to absorb and radiate two orders of magnitude less photon power than a drone designed for 3 gees.
@Alex Tolley: I share your concern that Lubin is using “100% planetary defence” and “interstellar probes” as a cover for the weaponisation of near space.
The conical sail design makes me wonder: Might such a sail–a larger one, most likely–double as a ‘ramscoop-like’ brake when approaching a target star? If it could be given an electrostatic charge, it could possibly brake against the interstellar medium and the star’s stellar wind during approach, like the charged braking screens that Eugene Mallove and Gregory Matloff covered in “The Starflight Handbook.” (Especially if the conical sail was “tip-heavy”–if a spacecraft bus was mounted there, say–it would be stable while braking if it approached the star point-first.)
There will have to be a counter balance to the beam to counter act the momentum. Perhaps a high powered particle beam in the opposite direction would do. I personally believe particle beams to be better than lasers or optical systems.
@J. Jason Wentworth
The problem with an the alien Suns stellar wind is that it is very weak, the light given off from their surfaces has much more momentum per area.
@Isaac Kuo
Interesting to hear of an electron laser in your post… as it sounds like this relies on charged particles how does it overcome beam-divergence? Also, I don’t quite follow your deceleration-impactors and the puff of inert gas you mentioned; where exactly does the gas factor in?
I watched Pauls link to Lubin’s talk and I must confess, as naive as I might be even I started to think this might be a bit too beefy for something that isn’t military. Thanks Dr. Benford for highlighting those salient points in your response. I’m also a bit puzzled as to the use of visible light over microwaves and didn’t catch why.
I hope we can develop some realistic version of this directed energy beam riding to put into practice sooner rather than later. I vividly remember seeing the parabollic ‘lightcraft’ (the type that uses the resulting plasma for thrust) leap off it’s pole and shoot skywards with the stoccato cracking of the pulses. While this isn’t nearly the same as Dr Benford’s conical carbon beamriding sails, the stage is surely set for us to put whatever slice of the EM spectrum is best (cost, power etc) to good use as propulsion.
Edit: Oh, sorry, I read ‘X-ray-free, electron laser’ when I suspect it should be ‘X-ray, free-electron laser.’
My bad.
@Mark Zambelli – The example of lightcraft is one reason why I am wary of Benford’s idea of using passive stabilization. Lightcraft looked very impressive, being able to ride a laser beam for up to ten seconds up to 72m. That’s a great technical achievement, but…well, it’s only good enough for a cool technology demonstration.
In the fifteen years since, it has not progressed any further at all.
Even with fast acceleration (on the order of three gees), an interstellar mission would require acceleration over many weeks, not ten seconds. I’m more confident about a sailcraft that actively controls itself like today’s space probes. We have demonstrated space probes which can navigate with precision for many years. An actively navigating probe is the more sensible strategy, I think.
Re: deceleration: The basic concept is similar to Mag-Orion, but the source of energy is relativistic kinetic impact rather than nuclear bombs. The main starship is a large superconducting magnetic loop, with two or more modules strung on it like a necklace. This leaves a large circular hole within the loop of the ship’s shape. So, when the kinetic impactor sail drones arrive, navigating along the same beam that the starship centers itself around, they do not hit the ship. Instead, they pass through the loop shape of the ship just before impacting a puff of gas emitted from the starship. This inert propellant gas passes through the ship’s magnetic field undisturbed, but when a drone impacts it, this is heated into an explosion of charged particles. Those charged particles are deflected by the ship’s magnetic field, imparting thrust on the ship back towards the Solar System. The key insight here is that the specific impulse of the propellant is NOT limited to a small fraction of c, as it is for fusion bombs. This opens up the possibility for missions at a large fraction of c without large propellant ratios. As a bonus, the scale of the explosions is not limited to a large minimum energy, as it is for nuclear bombs. This makes each pulse smaller in scale, so the shock absorbing systems of nuclear pulse propulsion aren’t needed.
Finally, the use of an X-ray laser system mitigates political issues with possible use as a “death ray”. X-ray lasers can’t penetrate Earth’s atmosphere, so the only humans threatened by such a system might be the inhabitants of the ISS.
For some reason nobody wants to talk about the powersupply for our beam .
The reason Lubin and others end up with an impossibly large ”beaming apperture ” (I suppose that’s some kind of lense) , is perhaps because they don’t think so much about WHERE the power will come from : As in many other areas of tecknology , a modular design can have great advantages ..
Why not divide the powersuply into several smaller units , each suplying power for a laser , microwawe or ion beam ?
These would be positioned in line , , perhabs 2 AU long. When not generating a beam they would use their powersupply for stationkeeping .
Each unit would only have to push on our sail over a small distance (perhabs 200000 km) , and would then only need a reasonably sized ” beaming apperture”
Each unit could be tailormade to fit in a given transportsystem .
every ‘aceleration stage’ could be composed of 3 power-beamunits aranged in a triangle , aranged around the line of aceleration. This woud make real-time correction possible .
The optimal distance between units could be determined empirically.
In short , a kilometer-sized lense could be exchanged for a computational problem ,the problem of pointing many powerbeams exacly in a coordinated manner … This would involve learning to live with the timelag over 2AU , and would surely be a great headache , but perhabs much less than getting the funding for a 10 km lense !
With an acleration of 5G , over 2AU this would give 3% of C . If positioned every 200.000 km , we would need 1500 power-beam stages , but the system could be usefull a long time before such a number was reached . And with higher aclerations the number could be much smaller .
@ Ole Burde. Ism’t this similar to the beaming relay stations for interstellar flight (cannot remember the author’s name). If the system was closer to the sun, how would you keep the beamers aligned as their moved into their own orbits? The advantage of a single beam is that is not problem. Maybe we allow for that and have many beamers in various orbits so that enough can be used at each stage.
Alex Tolley : These are not ”relay stations” ,because such a sceme would loose energy in a great number of occasions while converting energy from this-to that .
The beaming stations must have their own powersuply( solar or nuclear or other) , and their own ion-propulsion systems . The powersupply will only be needed for the beam generation in a relatively small time period ( when acelerating a sail-unit) , the rest of the time power is used for ”station keeping ” which would more or less be trying to stay in a straight line .
This necessety for resisting solar gravity might tip the balance in favour of a nuclear powersupply , because we then could place the whole alignment of power-beam units much furter away from the sun .
On the other hand , IF our units have enough solar propulsion capability , the computatinal problem of exact pointing under conditions og timelag will be a lot easier closer to earth …
I have not yet done the calculation of how much acceleration wil be needed as a funktion of distance from sun (anybody want to help ? ) , but it seems logic that the whole scheme should be possible at some kind of minimal distance from the sun ….it is also logic that the power-to-mass ratio of the units must be as big as possible to bring the possiblity of alignment closer to earth .
Anyhow , the basic idea is to use relatively cheap masproduced units , starting with a few sub-scale units to accelerate sails weighing only few grams .
My idea for an X-ray free electron laser system would use solar power, and would ideally be sited in a solar orbit perpendicular to Alpha Centauri. The free electron laser itself is on the order of 10km long, built out of mass produced linear accelerator modules flanked by solar panels.
The zone plate is on the order of 1 light second away from the laser – its orbit is not actually centered on the Sun. The zone plate is very thin and lightweight, so the photon pressure of the laser and sunlight pressure pushes its stable orbit a bit toward Alpha Centauri with respect to the laser. The fringes of the zone plate are lined with tiltable sails to keep it in position to aim the beam.
So, the source of the beam is not a fixed point. Rather, the source sweeps around the Sun in a circular motion. The beam is aimed slightly inward to compensate for this. This feature might be used by the drone sails to make it easier for them to navigate to the center of the beam. It’s also possible to include some redundancy in the system by having more than one laser system sharing the same circular orbit (or nearby circular orbits).
This solution doesn’t generalize to the use of multiple short range beams in linear formation. For that, it may be necessary to avoid solar “orbit” altogether. Instead of a true orbit, you have them in a linear trajectory moving directly away from the Sun…just barely at escape velocity. Even if this is set to be just under escape velocity, it’s not a true orbit because this “orbit” has a perihelion inside the Sun (technically, it’s a suborbital trajectory). By giving just barely above escape velocity, the beam units continue moving outward away from the Sun forever…just at slower and slower rates. It’s an expensive challenge to reach this “orbit” in the first place, but not entirely infeasible. Due to the long distances from the Sun, though, nuclear power is likely the only real option. That increases the cost and mass compared to solar power.
I don’t really care for concepts involving a linear formation of short range beams. I feel the scaling of a free electron X-ray laser system works better. You still have a linear formation of mass produced modules, it’s just that they’re bolted together into a single spacecraft. The more modules you add, the more powerful the beam and the tighter the beam (beam tightness scales inversely with the square root of the number of modules). The beam tightness isn’t sufficient for reaching across interstellar distances, although it may be tight enough for interplanetary distances (asteroid defense). The lightweight thin zone plate basically acts as a booster that increases effective range by many orders of magnitude, while absorbing at least half of the beam power.
Isaac Kuo : you may be right about the free elektron X-ray laser in general , but the subjekt of a giant lightweight zoneplate is far out in the future , as is a 10 km size aray of linear acelerators .
Compare this to a linear formation of short range beams using upgraded present day tecknology , and scaled down to a size where the cost would comparable to many other existing projects .
For a start , the first few power-beam units would need very little propulsion capability to stay in line ,perhabs starting at L3 or perhabs starting right outside the window of the ISS , making them possible with existing ion propulsion tecknology .
A bout the weaponization aspect of lacertecknology , consider this : what realy kills people in our period of history is mostly low-teknology warfare happening in underdeveloped countries . Rifles , RPG’s , bigger guns muonted on SUV’s , large quantities of explosives detonated in crowded places , at most ‘barrelbomps’ droped from aging helicopters . Even in the Ukraine where Russia is involved its nothing more than 1945 -level warfare . On the other hand , the most powerful example of the actual USE of a high tec weapon system is the game changing DEFENSIVE use of the israeli anti-missile system Iron Dome.
@ole burde
A 10km long linear accelerator is not far out future. We already have a 3km long linear accelerator. It’s just a matter of adding more accelerator modules, according to budget. Keeping them lined up with each other is a matter of engineering a straightforward truss.
The biggest problem with a linear formation of short range accelerators is the budget. Let’s say you want an acceleration length of 2AU, and each beam has an effective range of 1000km (this is ten times better than our best optical lasers, currently). That means you need to have 150,000 beam drones, and EACH ONE of these needs to have the full power required to accelerate the spacecraft. The power supplies blow up the budget by a factor of 150,000x, compared to a single long range beam system.
It’s true that a 10km long free electron beam system is larger than anything we’ve flown before…it’s profile is about the same size as 100 ISS’s laid end-to-end. But it’s mostly flat, and most of the area is simply the fixed solar arrays flanking the compact accelerator/free electron laser modules along the centerline.
Like it or not, any interstellar mission is going to be much larger in budget and scale than any space mission we’ve done before.
The 1km diameter zone plate is more of a challenge, being 50 times the diameter of the Ikaros solar sail, and similar in profile to 100 ISS’s laid out in roughly 10×10. Note that it does not need to be rigid; it’s like a solar sail. What matters is the lateral position of each bit. Due to limitations of our launch rockets, the zone plate would need to be sent up in rolled up strips, or it would be printed in space. Either way, it’s a bit more complicated than the linear accelerator, which is made up of modules similar to today’s spacecraft and simply bolted together in a long line.
Oh, also – even a single individual module can be useful in Earth orbit for purposes of de-orbiting space debris and de-orbiting spacecraft (today’s spacecraft include a margin of fuel to de-orbit themselves; this eats into their payload). As more modules are linked together, the beam has more power and range, making it better and better at de-orbiting space debris and client spacecraft.
A 10km long ultimate length could be composed of 1000 modules, each 10m long (and much wider, due to the solar panels). The more modules that are added, the greater the range and power, so it could be used for asteroid and comet defense.
Isaac Kuo : What kind of acceleration would you get , and for how long a distance would such a bolted-together aray be capable of focusing on a sail ?
In my example , the acceleration of 5 G was aplied over 2AU , do you believe the free elektron laser could work over such a distance ?
The idea of a spaced out linear formation of power-beam units with independent powersupply , is among other things relevant to keep acceleration DOWN to a limit where lightweight or sensitive structures can survive , including humans . Even if the free elektron laser should prove to be the best beam-option (it seems a very good candidate) , it might still be best to space the system out in order to get a smaller acceleration for a longer time and in order to to reduce the size of the apperture or zone disk .
Using free elektron lasers might reduce the number of necesarry power-beam units drasticly . As you said , with presentday optical laser it would demand many thousands of units . Perhabs with free elektron lasers this could be limited til to less than hundred
@ole burde
The design I have in mind would have an effective range of around 4.3 light years. The acceleration is around 1/30 gee, to keep the power requirements low, so the drones reach a speed of around .5c by the time they reach Alpha Centauri (it takes around 16 years for them to reach Alpha Centauri).
This would be for a simple flyby mission. One good thing about having a laser with such a long range is that it can provide power to the probes. Each of the drones is far too small and lightweight for nuclear power, and they spend too little time in the Alpha Centauri system to get much solar power.
But they can have laser power for years after passing through the system. That way, they can gather lots of data while passing through the system, and then take many months/years transmitting the collected data back home.
For a starship mission where the ship (manned or unmanned) stays in the Alpha Centauri mission, a similar outward acceleration of 1/30gee could be suitable. The much larger mass of such a ship calls for a more powerful laser system, of course, than what’s suitable for a swarm of lightweight laser sail drones.
In this case, the outward acceleration of 1/30 gee is maintained for only part of the journey…perhaps 2/3 of the way…to mitigate the speed that needs to be killed off during the deceleration leg. The ship then coasts while the braking drones are accelerated to catch up with the ship. They catch up just before arrival, powering a high gee braking run with kinetic impacts on inert propellant.
This more powerful laser system may accelerate the braking drones at perhaps 1/10 gee, so they quickly catch up with the ship and have reached a high fraction of c by the time they reach the ship.
The extremely long range capability of a zone plate focused free electron laser is a real game changer. It lets you think in terms of relatively low accelerations and consequently lower power requirements, while reaching velocities unattainable by fusion based propulsion.
Isaac Kuo : I tried for most of the day to read-up on zoneplates , and specially on the effective range of focussing . Its a new subject , not too much material avaiable publicly . It seems possible to ”print” a lightweight zoneplate that can withstand the bombardment , but how did you calculate the ratio of 1km zoneplate size to 4lightyear distance to Alfa Centauri ?
@ole burde – Unfortunately there’s not much literature out there on long range zone plates. The zone plates used today are small, and meant for very short range use. The same basic equations apply to long range zone plates, though.
The important things are:
1) A zone plate can focus a laser (focal distance depends upon wavelength, so the single wavelength nature of a laser is critical)
2) A zone plate can focus onto a spot size according to classic optics diffraction limits. Thus, the beam spot size is about 2*1.22*wavelength*range/aperture in diameter. (See diffraction limit, airy disc.)
3) A sinusoidal zone plate absorbs 50% of the energy of the beam, but it must have a varying transparency smoothly transitioning between fully transparent and fully opaque with each zone. This may or may not be easy to accomplish. A simple binary zone plate consisting of alternating transparent and opaque zones absorbs 50% of the beam energy while scattering another 25% of the beam energy. This means only 25% of the beam energy ends up in the airy disc.
I assume the use of a simple binary zone plate, since it may be much easier to manufacture and it is insensitive to plate thickness and material.
With a wavelength of around 1e-11m (about 115keV), a 1km diameter zone plate gives a target spot diameter of about 1km at 4.3 light years away.
2*1.22*1e-11/1000*(60*60*24*365.25*4.3*3e8) = 993
I envision a large number of sail drones filling this space. For example, if each drone is 10cm in diameter, we’re talking about 100 million drones. This can be suitable for kinetic impact powered propulsion to brake a starship. If the starship is cruising at 100,000km/s (about 1/3c), then 100 million little kicks translates to 1m/s per kick. A deceleration at 2 gees would be 20 kicks per second…limiting the shock isolation requirements to only a few cm of play.
Looking back on my calculations, the actual spacing between the x-ray laser and the zone plate is about 10 light seconds, rather than 1 light second. The optimal spacing depends on what spacing between the zone plate zones is desirable.
Isaac Kuo : You are right , in theory this could work better and cheaper than most other possiblilities . In a few years it will be more clear to what extend the theory can be made to work in tecnologic reality , and where the bottlenecks are.
In the meantime it makes sense to advance several kinds of beam-power strategies , until the day where a real ‘design contest’ can be made
In any case , we need a robust roadmap for how to advance our general purpose. A roadmap that dosn’t depend on any one highway to get where you want .
Many different different problems have to be solved , and some of them are more or less white spots on the map , waiting for ANY kind of solution to fill them out . Those are the areas where an investment give the best results , and you just convinced me that zone plates are one of these areas .
@ole burde – The challenges of getting any sort of interstellar mission done are so vast in scope that I don’t think there can really be a “robust” roadmap…not yet, anyway. I have a vague roadmap, where these X-ray lasers are initially used for space debris sweeping and then asteroid/comet deflection, but generally just getting much less expensive launcher systems are the key to most any interstellar mission concept.
An interesting alternative would be if it were possible to site the acceleration beam system on Earth – that might dramatically reduce the costs and challenges. However, it just doesn’t seem to work. Beam spread for a microwave beam would be too great, and any other sort of beam would have difficulty with the atmosphere and clouds.
By the way, I have sketched out a graph of a rough mission profile for a manned return mission using Relativistic Kinetic Impact Powered Rocket propulsion:
https://plus.google.com/+IsaacKuo/posts/QYAyAoDYk87
The total mission duration is about 4 decades, with about 1 decade spent at Alpha Centauri. The X-ray laser system is employed nearly continuously. When one swarm of drones reaches the starship, a new swarm of drones begins its acceleration toward the starship.
Acceleration toward Alpha Centauri is initially a bit sluggish, because the energy transfer to the sails increases in efficiency with speed and the first swarms don’t have enough room to accelerate much before reaching the starship. But the acceleration progressively picks up. The acceleration back home is actually much zippier, thanks to the long run up time available.
Alex Tolley imagines that Lubin et al don’t know of that there are small sails will fall off the beam. I can easily imagine they don’t know it. I suspect they just don’t know the literature.
Isaac Kuo presents the idea of very low accelerations getting drones to Centauri in 16 years. That won’t work because it will require a pointing accuracy about one part in ten to the thirteenth, far greater than the present state-of-the-art. Accuracy is frequently neglected in discussions of beam-driven sails and is a real challenge for low acceleration schemes and, of course, long distances.
Isaac’s comment about ‘passive stabilization’ is wrong I think. What he calls ‘passive stabilization’ is a naturally occurring restoring force if the sail is properly shaped: to have a sail shape which naturally stays on top of the beam should either the sail or the beam wander off-center.
Active stabilization requires steady application of forces in a situation where a momentary failure will lead to loss of the mission. That isn’t a wise thing to do. One wants to start from a stable situation and a conical sail gives you that situation.
It doesn’t have to be ‘passive’ either: the angular momentum of the sail can be changed by the angular momentum of the beam i.e. spinning photons. This helps keep the sail out of unstable situations. Generally speaking, increasing the spin rate will tend to dampen instabilities in the sails motion. But it is still better to start from a stable situation.
The discussion between Isaac Kuo and old burde describes a system that I think has much impossibility in it. As I mentioned above, it will require a pointing accuracy far greater than the present state-of-the-art. And the swarms will not stay on the beam, as I’ve said above. Moreover, what is the sail made of? Materials that are not lattices absorb x-rays, not reflect them, so at these power levels will be vaporized not accelerated. So I think this whole architecture of many accelerators in a line is simply a nonstarter.
The pointing accuracy is not as much of a problem, due to the way the optics work. There is a ten light second separation between the X-ray beam source, and the focusing zone plate. Fine aiming is done by adjusting the lateral position of the zone plate, keeping the zone plate and beam emitter steady with a navigation accuracy of 1mm entirely doable with laser navigation beams for reference.
At a distance of 4.3 light years, this translates to an accuracy of 14km. What really matters, though, is how rapidly or slowly the beam drifts. Both the starship and the drones actively keep themselves aligned with the beam, so as long as the beam drift is slower than their lateral acceleration capability it’s okay.
I have assumed the drone sails are made of graphite, because they accept high temperatures, and actually scatter a decent fraction of these wavelengths rather than absorbing it (about 1/3 absorbed, with about 2/3 scattered). Based on the temperature limits of graphite, I calculate that it could handle up to around 3 gees of acceleration. However, I conservatively assume 1/10 gee instead. The drone sails include digital logic circuitry to steer themselves within the beam.
With the use of an X-ray laser, the sail is basically inherently stable to begin with. For better or worse, the force on the sail is almost directly along the beam, regardless of the shape or orientation of the sail. These hard X-rays pretty much either pass through, get absorbed, or get scattered symmetrically. In order to get a sideways force (for steering), the sail relies upon asymmetric coating. This means more waste heat is radiated out of one side than the other.
Another potentially good sail material may be tungsten. Tungsten would ideally be matched with a laser slightly less hard – tuned to near its K edge transition so it mostly scatters the photons rather than absorbing the photons.
James Benford : The Idea I tried to describe was not in any way limited to a specific kind of wavelenght for the powerbeam (such as X-ray) , nor was it limited to a specific kind of saildesign . Active stabilization may well be the only solution , as many believe .
What I tried to argue for was a modular design of the Power-Beam array , build up of individual units capable of positioning themselves in the right place . This is comparable to a Railgun , where each magnet accelerate the bucket while it passes through , only here the ”rail’ has no fysical existence, but is build on the ability of the power-beam units to move themselves . The power aplied from tree almost-parallel directions would have a limited abilty to correct the trajectory of the sail , hopefully without interfering with the ‘active stabilization’ of the sail itself .
The advantage of such a scheme is the alround-flexibility in the early stages of R and D . As soon as you have two sub-scale power-beam units(each consisting of at least tree beam-producers) it becomes possible to start learning the procces of accelerating the sail through a series of ”hoops ” . Al this could be simulated in a laboratory setup just ”a little bit’ more complicated than the one you descriced in Starship Congres …