‘LightCraft’ is the term used by Slava Turyshev’s team at JPL and elsewhere to identify the current design of the ambitious mission we looked at briefly in the previous post. This is a Technology Demonstrator Mission (TDM), which can be considered a precursor to what may become a mission to the solar gravitational lens. The mission concept is under active investigation, partly via a Phase III grant from NASA’s Innovative Advanced Concepts office. Reaching the focal region (for practical purposes, beyond 600 AU) in less than 25 years requires changes to our thinking in propulsion, not to mention payload size and the potential of robotic self-assembly en-route.
Hence the paper the researchers have just released, “Science opportunities with solar sailing smallsats,” which makes the case for leveraging our growing expertise in solar sail design and the highly successful move toward miniaturization in space systems, which the authors believe can be extended to include smallsats operating in the outer Solar System.
The TDM mission is conceived as a series of preparatory flights that allow the testing and validation of the technology and operational concepts involved in a mission to the focal region. The implications are hardly limited to the outer Solar System, for the smallsat/sail paradigm should be applicable to a wide range of missions in the inner system as well.
Let’s pause for a moment on the term ‘smallsat,’ which generally refers to a spacecraft that is both small and lightweight, usually less than 500 kilograms, and sometimes much less, as when we get into the realm of CubeSats. Frequently in the news as we explore their capabilities, CubeSats can get down to less than 2 kilograms. What the authors have in mind is a demonstrator design that is scalable, the initial payload in the 1-2 kilogram range, but capable of moving up to between 36 and 50 kilograms.
The goal is a demonstrator mission that will perform a one to two-year test flight using a solar sail and a sundiver maneuver to achieve speeds greater than 5 AU per year. The figure works out to something on the order of 23.6 kilometers per second, an impressive feat given that Voyager 1, our current record holder, is moving at 17.1 kps. With the TDM demonstrating the capabilities of the sail’s vane structure and the needed control for perihelion passage, the full solar gravitational lens mission contemplates still higher velocities, reaching 20 AU per year (roughly 95 kilometers per second).
The SGL mission concept is being built around in-flight cruise assembly of the full spacecraft through modules separately delivered as 20 kilogram or less smallsats. Given that overall design, you can see the need for the demonstrator mission to shake out both sail and sundiver concepts. Thus, while the TDM payload includes science instruments, the real focus here is on demonstrating the method: Use smallsat technologies with a highly maneuverable sailcraft to enable the fast travel times that will make reaching the focal region feasible. This is not the place to get into exoplanet imaging; we’ve discussed what a full-scale SGL mission could accomplish in these pages before. See, for example, A Mission Architecture for the Solar Gravity Lens.
So let’s focus on the sail and the sundiver maneuver. In the last post I mentioned the unusual design of the sail, which grows out of work at JPL in conjunction with L’Garde, further refined by space services company Xplore. The sail design, pictured below, draws on square panels aligned along a truss to provide the cumulative sail area needed for the mission. It’s a striking object, not the conventional image of a solar sail – I did a double take when I first encountered it in 2020. L’Garde has put together an eye-catching 1:3 scale model that hangs at the Xplore facility in Washington state.
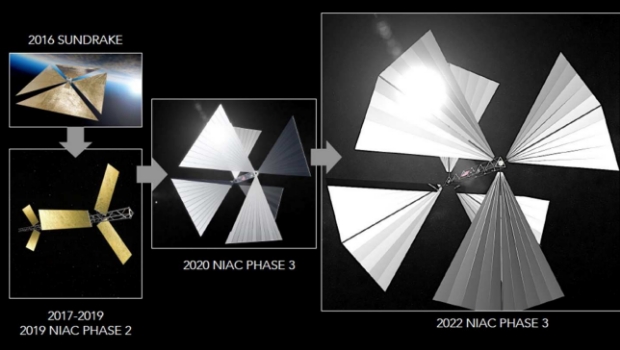
Image: This is Figure 3 from the paper. Caption: TDM vehicle configurations (PDR: July 18, 2022). Credit: Turyshev at al.
The LightCraft TDM is envisioned as a 3-axis controlled spacecraft capable of the attitude control crucial for the Sundiver maneuver it will perform to reach cruise speed. Here are a few relevant details from the paper. Note the remark at paragraph close:
Each sail element, or vane, can also be articulated to provide fine control to both the resultant thrust from solar radiation pressure and the vehicle’s attitude. Each dynamic vane element is also a multifunctional structure hosting photovoltaics and communication elements with the requisite degrees of freedom to meet competing operational and mission requirements. The current TDM design total vane area is 120 m2 and the mass of the integrated TDM vehicle is 5.45 kg, resulting in an area-to-mass ratio of A/m = 22 m2/kg, or nearly 3 times the performance of other existing and planned sailcraft.
The mission concept relies on placing the sailcraft in a trajectory that takes it to solar perihelion – head first for the Sun, then leave it at high velocity, using the momentum of solar photons to push the craft, and again using the precise attitude control available through the SunVane design to adjust subsequent trajectory as needed. What this trajectory demands, then, is sail materials that can withstand a perihelion in the range of 15 to 20 solar radii, which the Phase III study research indicates will be available within the present decade.
This proof-of-concept demonstrator mission would aim at deployment through a rideshare launch, sharply reducing the cost in comparison with larger payloads, with checkout in a ‘super-synchronous’ orbit (meaning higher than geostationary orbit and moving faster than Earth’s rotation). The paper describes an ‘outspiral’ into interplanetary space following the checkout phase, with a pivot at perihelion (listed here as 0.24 AU) to harvest the solar momentum needed to reach cruise velocity. The SunVane design allows the necessary maneuvering, as follows:
The trajectory is achieved with three simple control laws to maneuver the vehicle from geosynchronous orbit to perihelion and then egress: 1) maximum acceleration: align vanes perpendicular to the Sun to increase velocity; 2) no acceleration: align vanes edge-on to the Sun; and 3) maximum deceleration: align vanes so that the resultant force is opposite to the heliocentric velocity vector, to decrease orbital kinetic energy.
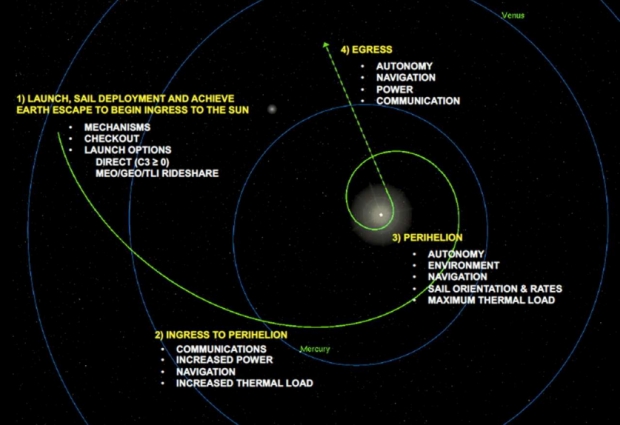
Image: This is Figure 2 from the paper. Caption: Common TDM mission phases and systems engineering objectives. Trajectory plot shown is for the SGL mission. Credit: Turyshev et al.
You would think the diciest part of the mission would be at perihelion (and of course it’s crucial), but I was interested to see that the authors consider the most dynamic phase for the sailcraft is during the exit from Earth, where the vehicle alternates between acceleration and no-acceleration (factoring in eclipse periods). Reaching interplanetary space, the sail decelerates inward toward the Sun. The sail vanes are re-oriented at perihelion, with six degrees of freedom to ensure responsiveness to error.
All of this, the authors report, is well within the capabilities of the kind of onboard inertial sensors we already use in space operations. With the vanes used for propulsion, attitude determination and control are handled by reaction wheels, gyro, star tracker, sun sensors and accelerometers for yaw, pitch and roll. The preliminary studies reported in this paper show a sail area on the order of 100–144 m2, with the overall spacecraft mass coming in between 4.2 and 6.4 kg. Note that the demonstrator would use photovoltaic elements on the sail vanes for power. Future missions to the outer system will also demand radioisotope power.
I’ll turn you to the paper for further details about how the smallsat/sail concept can scale the TDM into future missions, such as sail material (currently Kapton but with other choices emerging), insulation for perihelion, and the various investigations re communications, batteries and the development of small radioisotope power sources.
So how likely is a Technology Demonstrator Mission to fly? The next steps are cited in the paper:
The 2020 NIAC Phase III study concluded with a TDM Preliminary Design Review (PDR) on July 18, 2022 [7]. Next is pre-project mission development, which includes final design, hardware development, full-scale prototype construction, as well as hardware and software testing… Should funding be available, the TDM Critical Design Review (CDR) may be conducted in November 2023, when flight project commitment is expected, including a firm costing of the TDM. The total project cost will depend on the selected mission objectives, science payload, and experiments, and is expected to be in the range of $17–20M.
It’s compelling to learn that a lightweight sundiver mission may be built at a cost of tens of millions (the authors cite $30-75 million), which is quite a contrast to the $2 to $5 billion cost of the typical flagship mission to deep space. Developing such technologies pushes us forward on the miniaturization of scientific sensors that will benefit all classes of future missions to deep space. But numerous opportunities would also open up for targets closer to home in the Solar System. We’ll look at some of those next time.
The paper is Turyshev et al., “Science opportunities with solar sailing smallsats,” available as a preprint.


I have little doubt that the TDM can be accomplished with a very small payload, perhaps a 1-2U CubeSat. The technology seems within reach, with a 0.24AU perihelion 5x that of the Parker Solar probe with ~1/25 the PSp thermal load. Not trivial, but probably doable. The payload will need to be protected and that may be the difficulty.
However, what I want to address is the feasibility of connecting the payloads from a number of these sail missions after perihelion for the possible future SGL mission.
The difficulties will be to get the sailcraft to rendezvous fairly closely in space, but more importantly is the issue of docking the payloads together. As the sailcraft could only maneuver to place them end to end, the payloads must either be able to travel up or down the spine of each sailcraft, or they must be released in proximity to each other and self-propel themselves to make a docking connection. This docking will need to connect systems together, no simple task. Is there any idea of the engineering approach, or is this so far off it is only a conceptual idea?
The concept of smaller sailcraft carrying smaller payloads is very attractive, especially if swarms can flyby targets separated in time, collecting data and returning it to Earth. It allows redundancy, less complex engineering, and probably full computer navigation control to almost “launch and forget”, reducing mission control costs.
12 years ago a conference on SmallSats included a paper that looked at how far miniaturization might go.
DISTANT HORIZONS:
SMALLSAT EVOLUTION IN THE MID-TO-FAR TERM
Big news at phys.org
“Researchers devise new membrane mirrors for large space based telescopes.”
Perfect for solar staging-big craft to small?
Sundiver a big sail sunward-but edge on.
Then it sacrifices itself to generate a power beam to a small sail that is moving outbound. No lasers needed.
Call Les Johnson.
There exists an alluring synergy between this class of Sundiver type missions and the laser powered StarShot proposal. Since these new sail designs offer many degrees of freedom with navigation, it would seem that one is not restricted to a particular origin point for the laser light. If true, a laser-assisted Sundiver style egress could be substantially accelerated beyond 25 AU/year. This becomes even more attractive with laser relay stations installed farther out.
I agree. Lubin’s D-Star laser arrays pour immense energies onto sails to accelerate them with high g over a relatively short distance. Reducing the energy, but having laser array stations laid out, the time to accelerate the sails can be extended and the craft given gentler accelerations. Having said that, the fact that we have the sun pouring out energy that can be directly harnessed without creating a laser array infrastructure is very attractive. What might be cool is to replace Robert Forward’s Fresnel lens concentrator to propel a solar sail with some sort of solid-state laser material that could be cheaply manufactured in large sheets. The solar energy would be directly converted to laser light, perhaps in a phased array, allowing for longer-range acceleration with more accurate targeting. These devices could be mass manufactured in space and placed all over the solar system to power sails as well as other propulsion and energy consuming facilities.
Perhaps a combo of solid state laser chips on that sheet with each surrounded by highly reflective mirrors to allow recycling. If we recycle 1000 times, perfectly possible, we reduce the capital costs of the system by around 1000 or thereabouts.
We could use a phased array laser system on a large disc with a hole in the middle, the laser light is concentrated through the hole which then hits the sail probe to be sent out. The probe sail is highly reflective and bounces the laser light onto the back of the larger disc which is also highly reflective. In this configuration the laser light is recycled between the sail probe and large disc many times increasing the momentum transfer. We could potentially only need a deceleration phase on an ion engine type craft which falls towards the Sun where there is much more sunlight to power the ion engine. It would be sort of a short range booster, it could also be used to propel much lighter sails out at great velocities.
Further thoughts on the issues about multiple payloads combining via rendezvous to form a larger probe.
I have already mentioned the issue of docking 2 payloads to combine them. Unlike mating dragonflies, solar sail propulsion makes this very difficult. The best approach is for the sail closer to teh sun to maneuver up behind a sail in front of it by slowing it down by shading it. Then the 2 spines can dock. Either one payload is at the rear and one at teh front, or both are in teh same position and one sail has to turn 180 degrees to allow docking.
But here is teh problem, the sail containing 2 payloads will have its acceleration reduced (halved), and therefore to rendezvous with more sail probes it must be the most outward of the sail swarm so that the sails behind it can catch up to repeat the docking maneuver to add further payloads.
For sails, the payloads must all be of teh same mass. This likely means parasitic mass added to the lighter payloads, reducing performance to that of the most massive payload, but with the option of ejecting mass to aid rendezvous. This might well be useful if the sails have minor performance differences that need to be corrected by changing payload mass.
Each sail will need to be separated in space and time to prevent any interference at perihelion. So the sail swarm will need to close up like a bird flock or fish shoal to facilitate rendezvous. Perhaps the best solution is that found by computer simulations (e.g. Reynold’s “boids”) that each sail has a radio beacon and teh sails try to maneuver to the position that appears to have teh strongest combined signal.
Normally, a swarm of independent probe sails would offer redundancy in case of failure. A swarm of flyby sail probes can afford the odd failure. However, this is not the case with probes that must be combined into a functioning whole. Now we have a weakest link problem. Any failure could jeopardize the mission if a failed probe has a crucial component needed for the final combined probes. That failure could be with teh payload, or with teh sail system itself. A sail may fail with a malfunctioning blade, which prevents being able to rendezvous with teh rest of teh swarm, or more subtly, be unable to manage fine maneuvering for docking.
This all strikes me as very difficult engineering. I am sure the L’Garde engineers are far smarter than I am about these issues and have thought through possible recovery solutions. I would be entranced if they can demonstrate how this might work, perhaps with a cislunar demonstration of a swarm docking multiple payloads.
A logical precursor for swarms of satellites is “smart dust”. This has been proposed in vague terms for three decades ( https://en.wikipedia.org/wiki/Smartdust ) but made an appearance in Nature last year ( https://www.nature.com/articles/s41586-021-04363-9 ). Looking for that preprint I ran across other not-creepy-at-all papers by first author Vikram Iyer including devices attached to bees (102 mg, 6.1 × 6.4 mm^2: https://arxiv.org/pdf/1812.09419.pdf ). Those are described as using off-the-shelf components, detailed in the paper. It seems possible military models would be vastly more miniaturized, and their design might be divulged to astronomers and the public if (hypothetically) some stray ‘mote’ could be recovered along the path of the Chinese balloon that passed over Billings. Though I don’t know if nowadays any journalists or scientific journals would risk publishing any such data they were given for fear of getting the Assange treatment.
Satellite swarms would seem particularly well suited to the solar gravitational lens mission where pixels are few and far between. They would still need much more broadcasting power than the honeybee chips, and it would take a clever design indeed to avoid the need for a massive structure for their communications back to Earth.